 Субмиллиметровая точность
Субмиллиметровая точность
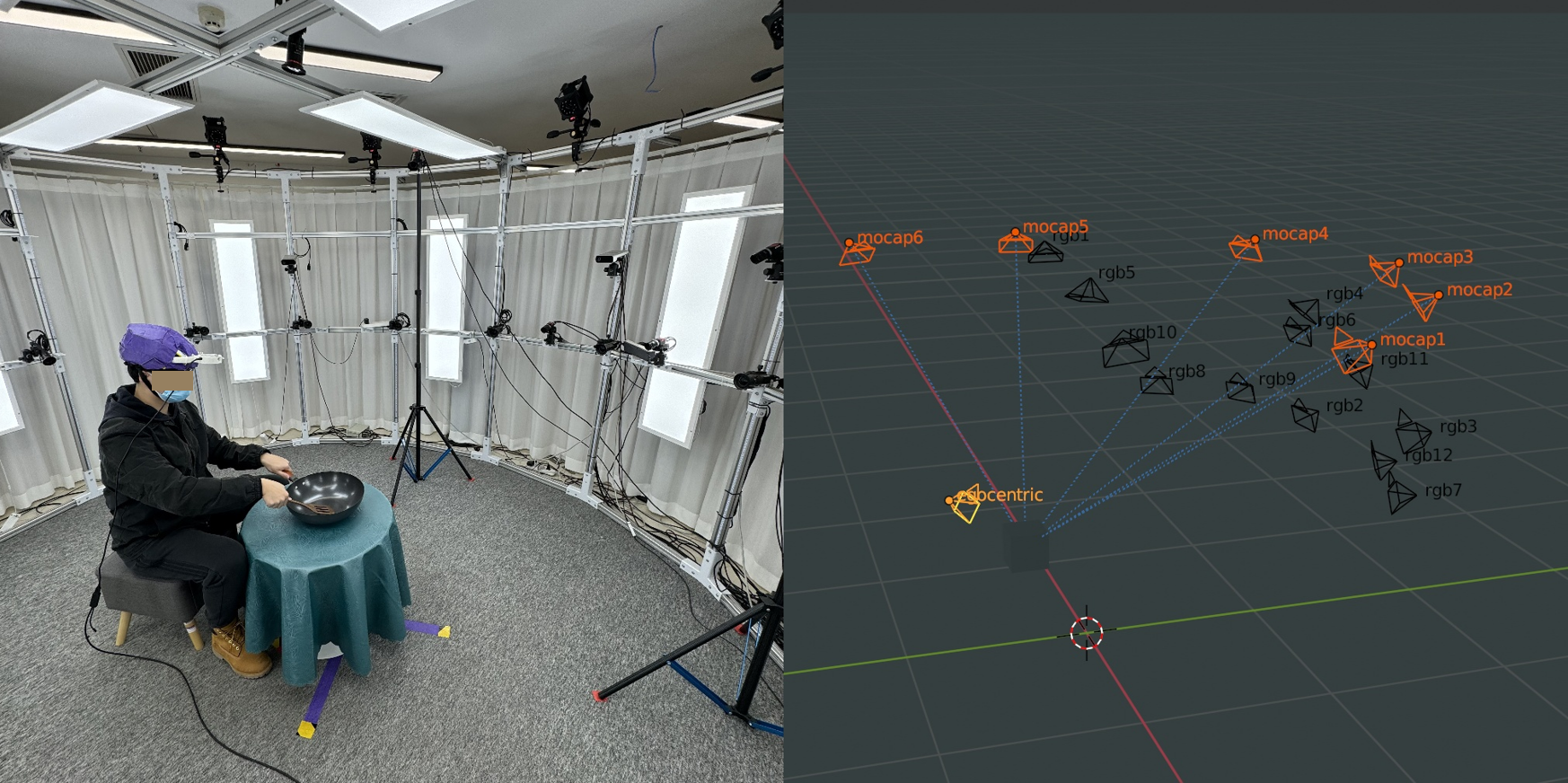
Оптико-инерциальная fusionная система слежения обеспечивает субмиллиметровую точность позиционирования и угловую точность 0,1° для высокоточной записи движений.
Мультиагентность и мультимодальность
Одновременный захват людей, инструментов и роботов с синхронизацией видео, силовых данных, ЭМГ и других сенсорных данных для полного восприятия сцены.
Потоковая передача данных в реальном времени
Полная совместимость с интерфейсами ROS/ROS2, VRPN и SDK для бесшовного подключения к платформам моделирования и управления роботами.
Гибкое развертывание
Поддержка решений как на основе маркеров, так и с использованием ИИ без маркеров, адаптируемых от лабораторных условий до крупномасштабных сценариев эксплуатации.
Высококачественный набор данных
Предоставление более 1000 часов очищенных данных о движениях человека и более 100 000 высококачественных образцов для обучения алгоритмов ИИ и роботов.
 Точный трекинг рук и пальцев
Точный трекинг рук и пальцев
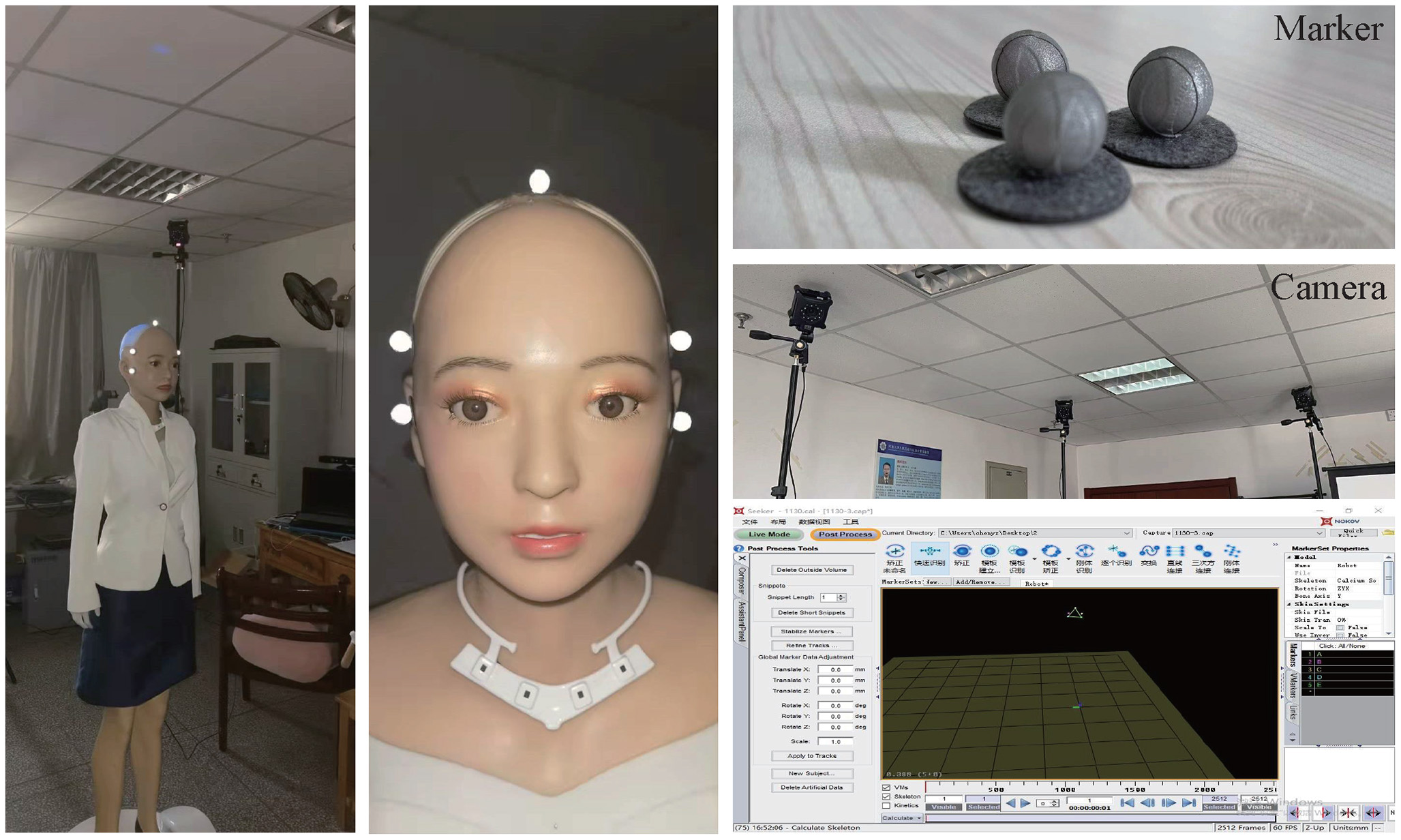
Захват мелких движений рук, пальцев и объектов с высокой пространственной точностью.
Захват взаимодействия человека с объектами
Запись координированных взаимодействий между руками, инструментами и манипулируемыми объектами.
Мультимодальные демонстрационные данные
Синхронизация захвата движений с видео, силовыми, тактильными и другими сенсорными данными.
Готовность к обучению роботов
Генерация структурированных наборов данных для имитационного обучения, LfD и обучения политик.
Интеграция в реальном времени
Бесшовное подключение к платформам управления роботами, моделирования и обучения.
 Высокоточные данные о движениях для обучения
Высокоточные данные о движениях для обучения
Предоставление точных данных захвата движений всего тела для обучения алгоритмов роботов.
Ретаргетинг движений человека на робота
Преобразование захваченных движений человека в исполняемые команды движения робота.
Интеграция с платформами моделирования
Плавное подключение к основным средам моделирования для итеративной настройки политик.
Поддержка обучения с подкреплением
Предоставление стандартизированных образцов движений для ускорения итераций обучения с подкреплением.
 Трекинг движений в реальном времени
Трекинг движений в реальном времени
Сверхнизкая задержка захвата движений и потоковая передача данных в реальном времени гарантируют мгновенное отражение каждого движения оператора роботом, обеспечивая отзывчивое и интуитивное управление.
Поддержка основных платформ гуманоидных роботов
Совместимость с URDF-моделями основных гуманоидных роботов и возможность кастомной интеграции и разработки для конкретных платформ роботов.
|
Поддержка URDF AGIBOT H2 |
Поддержка URDF Unitree U1/H1 |
Дополнительная кастомная поддержка URDF |
 Валидация замкнутого цикла Sim-to-Real
Валидация замкнутого цикла Sim-to-Real
Построение количественного сравнения между смоделированными и физическими данными робота; обратная связь полевых данных в обучающие модели. Поддержка сравнения по позиции/скорости/ускорению и пользовательских эталонов оценки.
 Универсальная платформа оценки движений роботов
Универсальная платформа оценки движений роботов
Решение проблем единообразия в массовом производстве роботов, предоставление стандартизированных воспроизводимых тестов движений и отраслевых эталонных решений.
 Быстрая адаптация к основным роботам
Быстрая адаптация к основным роботам
Адаптация к основным роботам, таким как Unitree и AgiBot, с помощью самостоятельно разработанных моделей ретаргетинга и обучения, поддержка кастомной разработки под конкретные сценарии.
Высокоточное воспроизведение телесных движений
Поддержка аватарного удаленного управления для ходьбы, бега, прыжков и разнообразных движений. Обеспечение низкозадержечного высокоплавного воспроизведения движений роботов для выставочных и коммерческих сценариев.


 Astra AI безмаркерный захват движений
Astra AI безмаркерный захват движений


Для гуманоидных роботов и телесного ИИ
Shadow Engine — это сквозная платформа, построенная на данных высокоточного захвата движений.
Обеспечивает полный конвейер от захвата человеческих навыков до развертывания роботов
и непрерывного совершенствования с помощью замкнутого цикла данных, обучения и валидации.