Ощутите непревзойденную точность для различных приложений захвата и отслеживания движений под водой.
Посмотреть характеристики
Основные характеристики
Точное отслеживание для морских и подводных приложений
Система подводного захвата движения от NOKOV обеспечивает исключительную точность с отслеживанием 6DoF. Используя легкие беспроводные маркеры, система достигает субмиллиметровой точности, что делает ее идеальной для таких разнообразных областей, как проектирование кораблей, морские исследования, рыболовство и спортивная наука.
До 240FPS с 4.0мс задержкой
Субмиллиметровая 3D точность
Подходит дляморского инжиниринга, исследований, спорта и многого другого.
Подтвержденная производительность морского класса
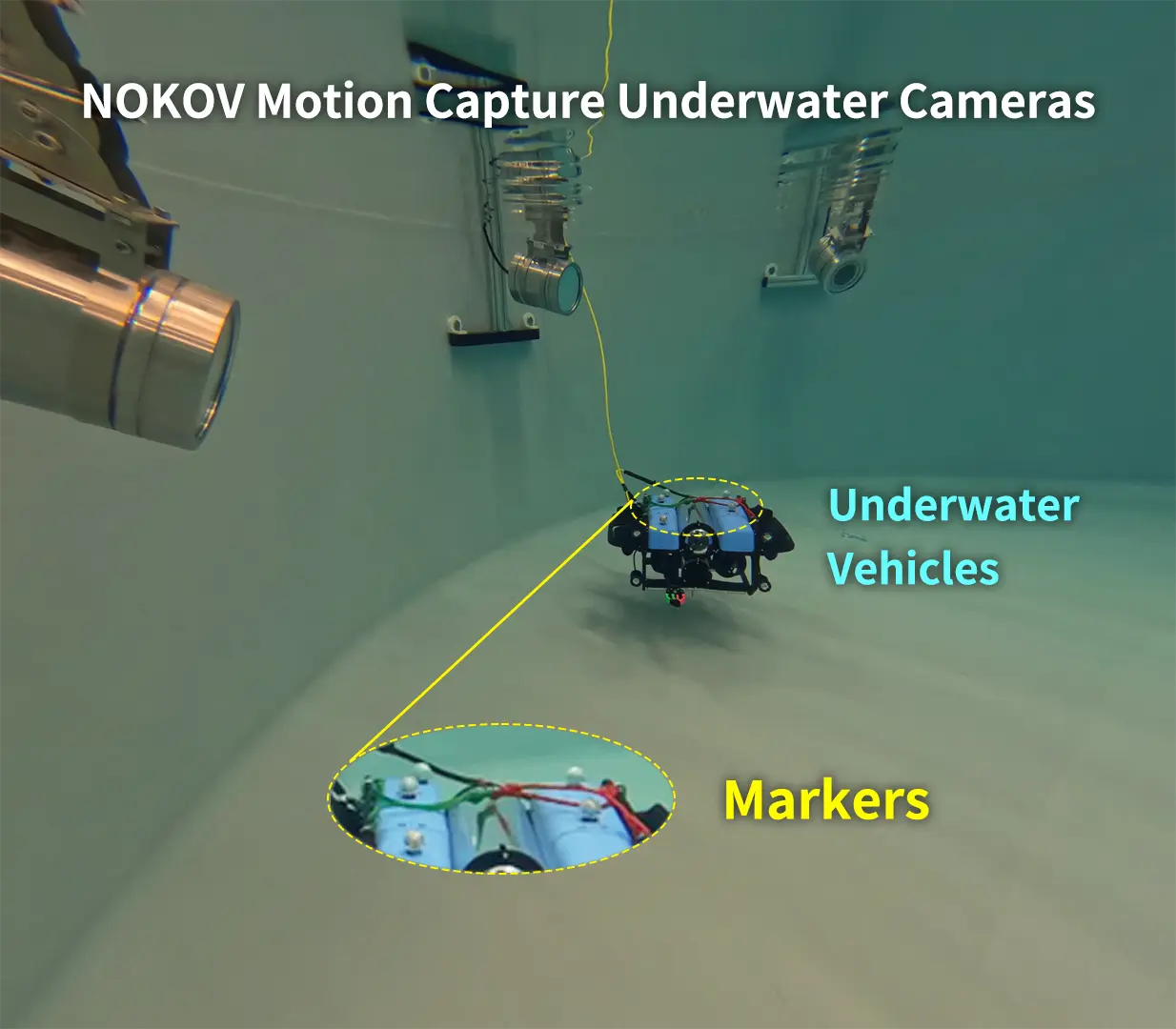
Специально разработанные для морских применений подводные камеры NOKOV проходят испытания на давление на глубине и имеют защиту от коррозии, что делает их идеальными для использования в солёной воде и хлорированных бассейнах.
Каждая камера NOKOV проходит обязательное 72-часовое стресс-тестирование на заводе, чтобы гарантировать максимальную производительность. Спроектированные для долговечности, наши системы доказали свою способность работать непрерывно в течение недель, обеспечивая высочайшую надёжность для ваших самых требовательных долгосрочных проектов.
Больше ценности, больше камер, лучшая стабильность - все в пределах вашего бюджета
Камеры захвата движения NOKOV предлагают отличный баланс между экономической эффективностью и повышенной стабильностью в индустрии захвата движения. С расширенным выбором вариантов камер наша технология обеспечивает надежную производительность и ценность.
Спецификации
Модель
P/N
Пиксели
МП
Разрешение
Частота кадров
FPS
Задержка
мс
3D Точность
мм
Захват Расстояние
m
ПНВ (Поле зрения)
Глубина m
Полные характеристики
Mars1.3HW UW
1.3
1280x1024
240
4.0
±0.3
6
95°×74°
100
Mars4HW UW-8-50
4
2048x2048
180
5.2
±0.25
10
74°×74°
50
Mars9HW UW-6-50
9
4250x2160
300
3.0
± 0.2
10
98°×50°
50
Mars18HW UW-8-50
18
4508x4096
139
5.0
± 0.15
10
73°×67°
50
Mars26HW UW-8-50
26
5120x5120
150
4.0
± 0.1
8
83°×83°
50
* Для получения подробных спецификаций или настроек камеры на заказ, пожалуйста, свяжитесь с нами.
Обширная интеграция и поддержка SDK
Наш продукт предоставляет мощные возможности плагина для UE, Unity, Maya, iClone, Motion Builder и других платформ. Он также предлагает обширную поддержку SDK для различных технологий, включая Linux, Python, MatLab, Simulink, C#, C++, и другие.
Линукс
Питон
Матлаб
Симулинк
C++
XINGYING 3.0
Программное обеспечение "всё в одном" для камер NOKOV
NOKOV предлагает экспертную поддержку и индивидуальные решения для всех этапов вашего пути в захвате движений, обеспечивая удовлетворенность клиентов и оптимальные результаты.
Онлайн-обучение
Обновления программного обеспечения
Поддержка OEM
Легкий заказ запчастей
Срочная доставка
Программное обеспечение для камеры
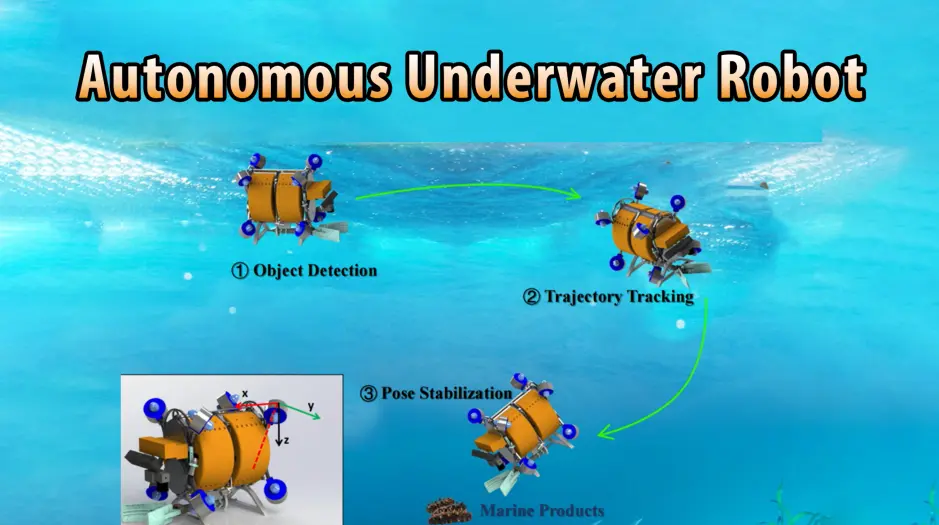
Мокап автономного подводного робота с полностью векторизованным приводом
Система захвата движения NOKOV с использованием подводных камер обеспечивает высокоточные данные о позиционировании, помогая подтвердить осуществимость и эффективность разработанного и изготовленного автономного подводного робота с полностью векторизованной структурой привода.
Высокоточный мокап подводных роботов
Подводный робот стабильно захватывается при движении вверх и вниз через поверхность воды, а программное обеспечение для захвата движения NOKOV с подводными камерами отображает его перемещение в реальном времени, обеспечивая стабильный вывод данных для исследований подводных роботов.
Мокап для исследований подводной робототехники в Техническом университете Мюнхена
Д-р Даниэль Дюкер из Института робототехники и машинного интеллекта Мюнхенского технического университета (MIRMI) использует систему захвата движения NOKOV (подводную версию) для получения высокоточных эталонных позиций подводных роботов, которые применяются для генерации обучающих данных и проверки алгоритмов управления и оценки.
Нужна помощь?
Оставьте сообщение ниже или напишите нам на электронную почту по адресуinfo@nokov.cn
Мы стремимся реагировать оперативно и свяжемся с вами через наших местных дистрибьюторов для дальнейшей помощи.
ИнженерияВиртуальная реальностьНауки о жизниРазвлечения