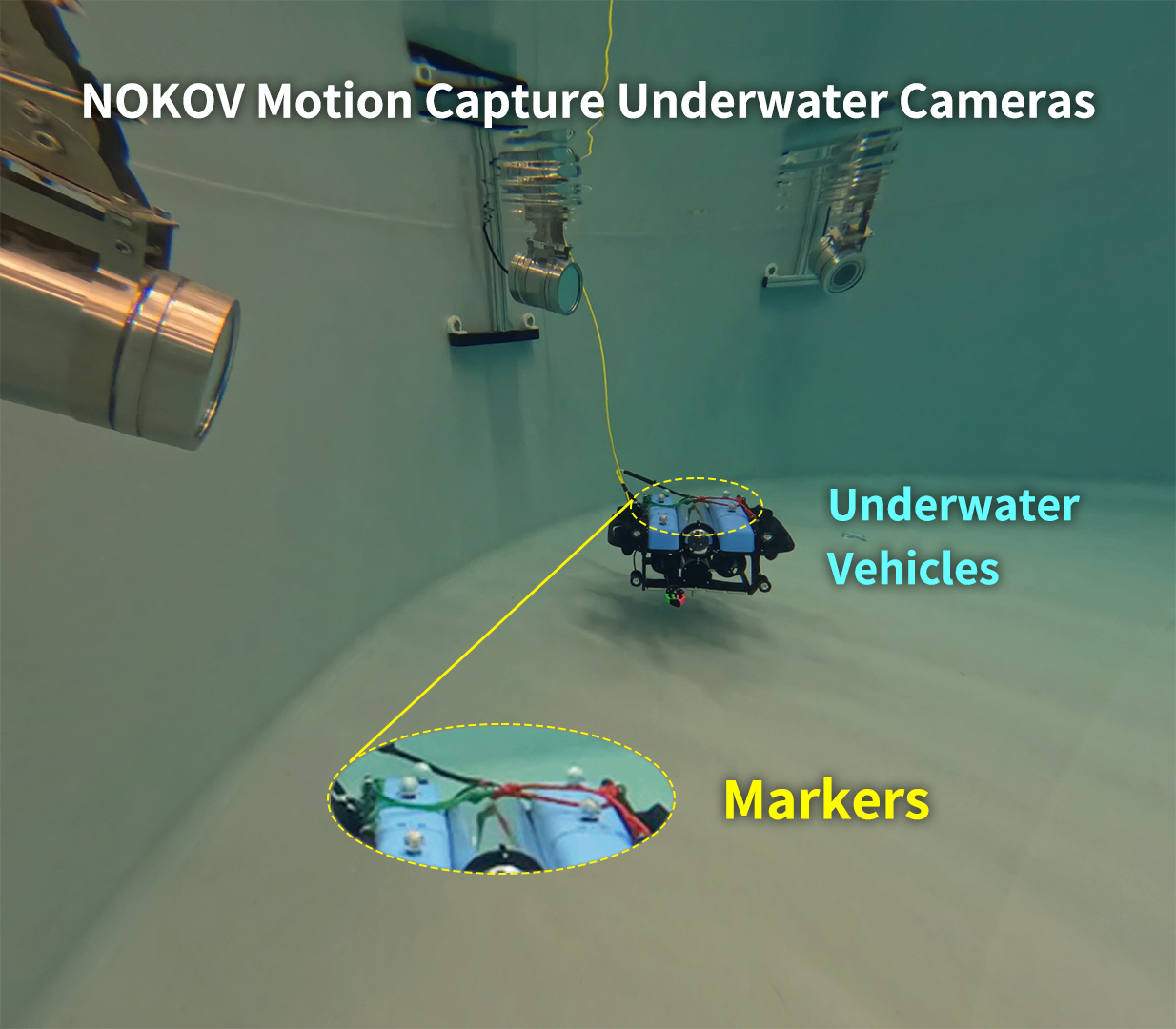
Доктор Даниэль Дюкер из Мюнхенского института робототехники и машинного интеллекта (MIRMI) Технического университета Мюнхена использует систему захвата движения NOKOV (подводная) для получения высокоточных эталонных положений подводных роботов, которые могут быть использованы для генерации обучающих данных и проверки алгоритмов управления и оценки.