
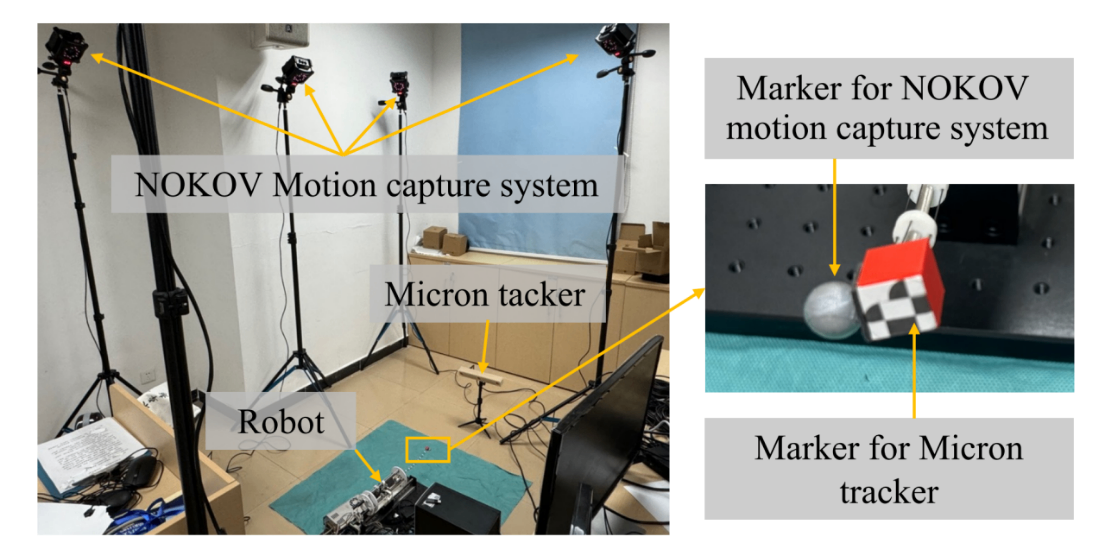
Исследовательская группа под руководством профессора Нин Тань из Университета Сунь Ят-сена опубликовала исследование о поведенчески предопределенной адаптивной системе управления (BPAC) для континуальных роботов в Международном журнале исследований робототехники (IJRR). Система захвата движения NOKOV предоставляет высокоточные данные о положении конечного эффектора для экспериментов, поддерживая проверку эффективности предложенного метода управления.
Исследовательская группа под руководством профессора Нин Тань из Университета Сунь Ят-сена предложила поведенчески предопределенную адаптивную систему управления (BPAC) для гетерогенных континуальных роботов (HCR). Соответствующая исследовательская статья «Поведенчески предопределенное адаптивное управление для гетерогенных континуальных роботов» была опубликована в Международном журнале исследований робототехники, ведущем журнале в области робототехники.
Система захвата движения NOKOV предоставляет высокоточные данные о положении для исследования, подтверждая точность шахматной доски и метода на основе зрения при отслеживании положения конечного эффектора континуальных роботов.
Цитирование
Tan, Ning, et al. «Поведенчески предопределенное адаптивное управление для гетерогенных континуальных роботов». The International Journal of Robotics Research 44.1 (2025): 65-95.
Исследовательский фон
Исследования по управлению континуальными роботами находятся на стадии развития, с множеством вызовов, которые необходимо решить. В данной статье рассматриваются следующие две основные проблемы. Во-первых, предыдущие методы управления испытывают трудности в достижении желаемой производительности в пространстве задач. Во-вторых, разнообразие гетерогенных континуальных роботов создает большие трудности для разработки универсальной системы управления.
Основные вклады
1. Комбинируя предопределенное управление производительностью (PPC) и нулевую динамику, разработан контроллер для достижения кинематического управления движением и визуального сервоуправления континуальных роботов. Это первое систематическое исследование PPC в пространстве задач, достигающее заданных показателей производительности без тонкой настройки параметров.
2. На основе метода нулевой динамики оценивается модель кинематики скорости робота. Контроллер и оценщик интегрируются для формирования адаптивной системы управления. Эта система требует только простой инициализации и онлайн-адаптации для быстрого приспособления к различным типам HCR.
3. Возможность, эффективность и надежность метода были проверены на пяти типах HCR, способствуя исследованиям универсального управления HCR на уровне применения.
Метод
Исследование предлагает поведенчески предопределенную адаптивную систему управления (BPAC), направленную на достижение кинематического управления в пространстве задач и визуального сервоуправления для HCR. Основная часть метода состоит из трех частей:
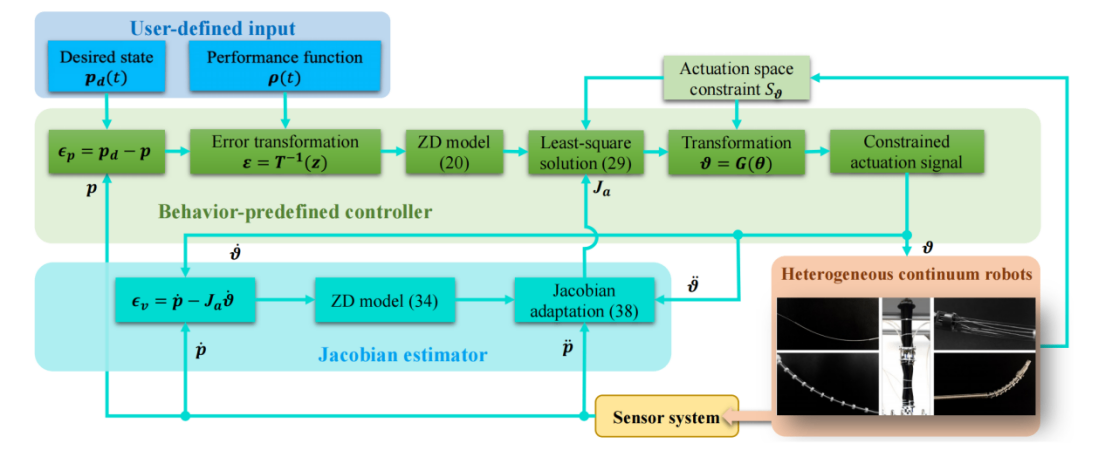
Диаграмма предложенной поведенчески предопределенной адаптивной системы управления (BPAC) для гетерогенных континуальных роботов.
1. Поведенчески предопределенный контроллер: Через преобразование ошибок и преобразование пространства действия пользователи могут задавать переходные ошибки, установившиеся ошибки и время сходимости. Когда степень свободы пространства действия является избыточной, ограничения пространства действия избегаются для обеспечения успешного выполнения задач конечным эффектором.
2. Оценщик Якобиана: Применяется онлайн-закон адаптации на основе нулевой динамики для оценки матрицы Якобиана робота в реальном времени. Этот оценщик не зависит от аналитических моделей или кинематических параметров и является ключевым компонентом для достижения универсального управления в гетерогенных условиях.
3. Улучшение сходимости и надежности: Для решения проблемы, что традиционные функции производительности могут привести к отказу контроллера, когда ошибки превышают предписанные границы при внешних возмущениях, предложена перенастраиваемая функция производительности (RePF). Эта функция динамически корректирует границы производительности, значительно улучшая надежность системы.
Симуляции
Эффективность предложенного метода управления проверена через симуляции на кабельных континуальных роботах (CCR) и концентрических трубчатых континуальных роботах (CTR). Результаты демонстрируют, что система достигает предписанного контроля производительности, обеспечивая переходные и установившиеся ошибки в пространстве задач, при этом удовлетворяя ограничениям пространства действия. При возмущениях система сохраняет стабильность благодаря RePF. Предложенный метод превосходит традиционные методы по точности и надежности, дополнительно подтверждая надежность адаптивных методов без модели.
Эксперименты
Для проверки предложенного метода BPAC на реальных системах были проведены физические эксперименты на пяти HCR:
Кабельный континуальный робот: Робот выполняет задачу отслеживания пути в форме пятиконечной звезды и точка-в-точку задачи в присутствии препятствий. Экспериментальные результаты показывают, что ошибка положения конечного эффектора сходится к менее чем 2 мм в предписанное время. При наличии неизвестных дополнительных нагрузок границы, указанные RePF, перенастраиваются для сохранения ошибок в пространстве задач в рамках этих границ.
Система захвата движения NOKOV использовалась как эталон измерений, и перекрестная проверка показывает, что фактический путь конечного эффектора, измеренный Micron Tracker, высоко согласуется с высокоточной траекторией, записанной NOKOV, со средней ошибкой всего 1.2 мм, устанавливая надежный стандарт для точности, достигнутой контроллером.
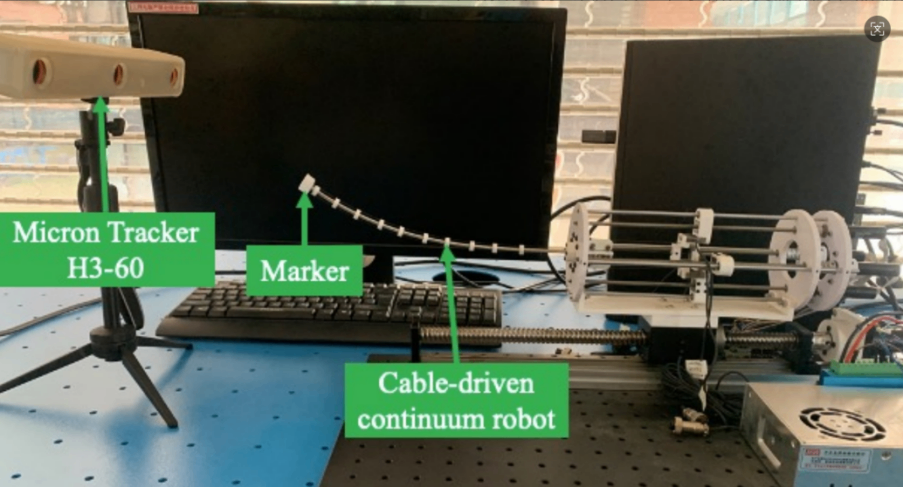
Экспериментальная платформа кабельного континуального робота.
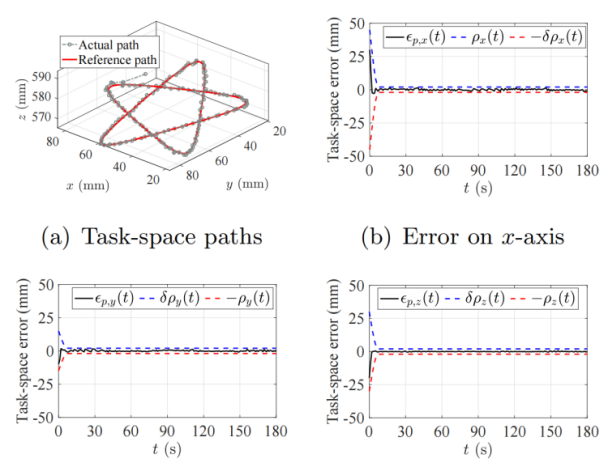
Результаты эксперимента CCR по отслеживанию пути в форме пятиконечной звезды.
Экспериментальная установка для проверки точности Micron Tracker H3-60.
Параллельный континуальный робот: Робот управляется для завершения точка-в-точку позиционирования и отслеживания кругового пути. Ошибка в пространстве задач всегда ограничивается предписанными границами производительности менее 1.5 мм.
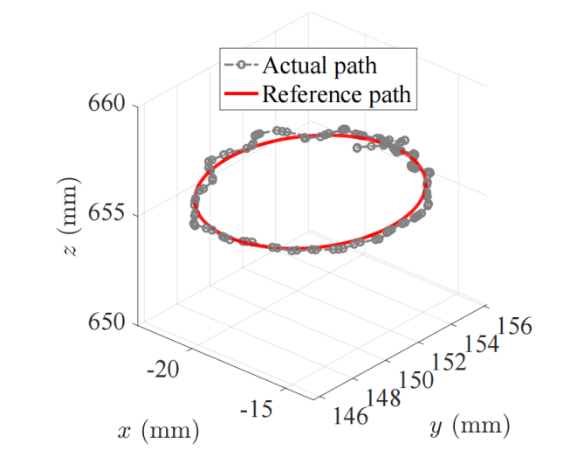
Профили эталонного пути и фактического пути PCR при выполнении задачи отслеживания кругового пути.
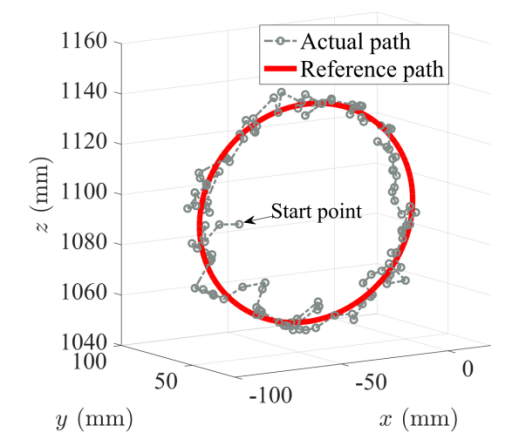
Концентрический трубчатый робот: Робот управляется для отслеживания кривой в 3D пространстве. Робот успешно завершает задачу отслеживания с ошибками в пределах граничных ограничений. Кроме того, границы, указанные RePF, перенастраиваются для сохранения ошибки в пространстве задач в рамках этих границ при воздействии возмущений, и ошибка все еще сходится к нулю после возмущений.

Профили эталонного пути и фактического пути CTR при выполнении задачи отслеживания.
Гибкий эндоскоп: Проводятся эксперименты по визуальному сервоуправлению для проверки предложенного метода BPAC. Целевая область определяется лазерной точкой, и желаемые характеристики изображения успешно достигаются. Даже при внешних возмущениях задача визуального сервоуправления завершается успешно.
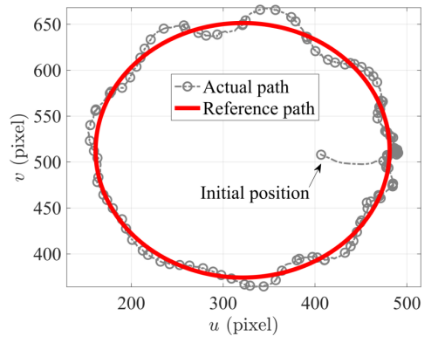
Профили эталонного пути и фактического пути эндоскопа в плоскости изображения при выполнении задачи отслеживания визуального сервоуправления с лазерным наведением.
Пневматический континуальный робот: Несмотря на внутреннюю дрожь прототипа, достигается стабильное отслеживание траектории и устойчивое к возмущениям точка-в-точку управление. RePF эффективно учитывает влияние немоделируемых динамик и внешних возмущений.
Профили эталонного пути и фактического пути PneumCR при выполнении задачи отслеживания.
Эксперименты полностью демонстрируют универсальность, точность и надежность BPAC на различных структурах и механизмах привода континуальных роботов.
Видео демонстрации симуляции и физического эксперимента
Система захвата движения NOKOV предоставила данные траектории с субмиллиметровой точностью, которые использовались для анализа ошибок и проверки точности визуальной системы в экспериментах.
Нин Тань (соответствующий автор), доцент, Школа компьютерных наук и инженерии, Университет Сунь Ят-сена. Его основные области исследований включают интеллектуальную робототехнику, интеллектуальное управление, медицинскую робототехнику, кооперацию многоагентных систем, биомиметическую робототехнику и искусственный интеллект.
Пэн Юй, аспирант, Школа компьютерных наук и инженерии, Университет Сунь Ят-сена. Его основные области исследований включают гибкие континуальные роботы и интеллектуальное управление.
Синь Ван, аспирант, Школа компьютерных наук и инженерии, Университет Сунь Ят-сена. Его основные области исследований включают управление медицинскими роботами.
Кай Хуанг, профессор, Школа компьютерных наук и инженерии, Университет Сунь Ят-сена. Его основные области исследований включают базовые теории встроенных/CPS систем и их промышленные применения.



