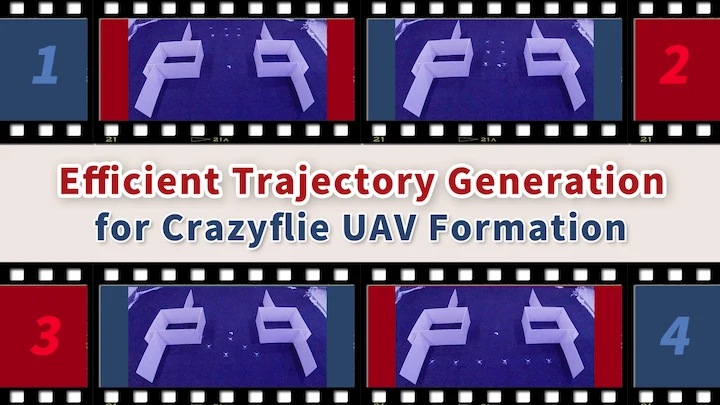
Применения в
Дронах и роевых системах
Подходит для исследований в области БПЛА/БПВ, многороботных систем,
формаций/роев, избежания препятствий/столкновений, планирования движения,
планирования траектории, планирования пути, SLAM, кооперации,
управления, обучения, локализации, навигации, восприятия,
видения, мобильных роботов, инспекционных роботов,
параллельных роботов, роботов на колесах и ногах.