
Исследовательская группа из Шаньдунского университета опубликовала статью под названием «Адаптивное управление скользящим режимом для отслеживания и подавления возмущений кабельных роботов с непрерывной структурой в эндоскопической хирургии» в журнале Control Engineering Practice. В статье предлагается метод адаптивного интегрального терминального управления скользящим режимом с расширенным наблюдателем состояния (NESO-AITSMC) для кабельных роботов с непрерывной структурой (CDCR).
В эксперименте система захвата движения NOKOV предоставила высокоточные данные о положении рабочего органа кабельного робота с непрерывной структурой, поддерживая исследование.
Цитирование
Zhang M, Chen Y, Gao Y, et al. Adaptive sliding mode tracking and disturbance rejection control for cable-driven continuum robots in endoscopic surgery[J]. Control Engineering Practice, 2026, 168: 106684.
Научный контекст
Кабельные роботы с непрерывной структурой достигают динамического соответствия при навигации внутри сложных трубчатых структур через бионическое змеевидное движение, обеспечиваемое их многосегментной гибкой архитектурой, и все чаще устанавливаются как идеальное решение для продвинутой эндоскопической хирургии.
Однако наличие нелинейных эффектов трения и упругой деформации кабелей в кабельных системах приводит к накоплению ошибок рабочего органа. Традиционные методы моделирования недостаточны для полной компенсации этих нелинейных динамических характеристик, что приводит к существенным неопределенностям модели. Кроме того, внешние возмущения, включая непредсказуемые силы контакта с тканями и сопротивление жидкости в анатомической трубчатой среде, служат для дальнейшего усиления отклонений траектории. Существующие методы управления обычно характеризуются недостатком робастности и демонстрируют ограниченную точность при работе с такими многоисточниковыми неопределенностями.
Основные достижения
Для решения вышеупомянутых проблем это исследование предлагает метод адаптивного интегрального терминального управления скользящим режимом с расширенным наблюдателем состояния (NESO-AITSMC).
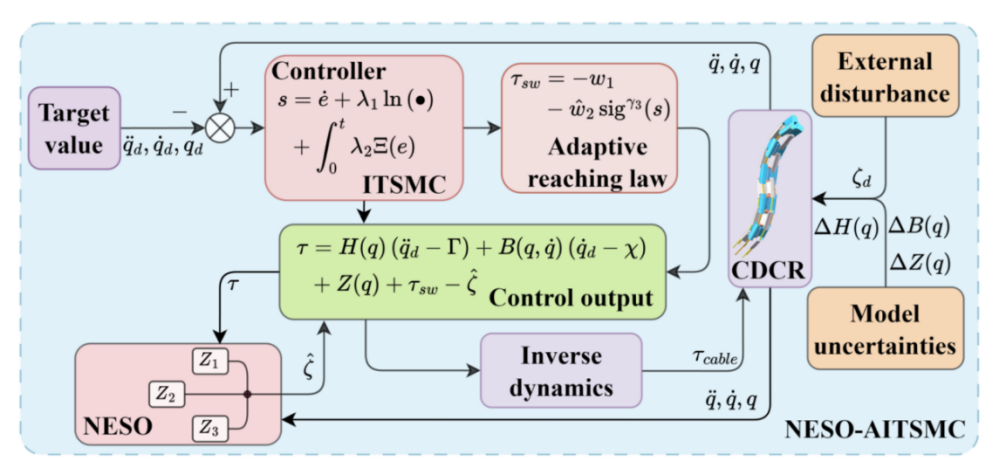
Контроллер CDCR
Основные достижения этого исследования можно суммировать следующим образом:
1. Разработан нелинейный расширенный наблюдатель состояния (NESO) со свойствами конечного времени сходимости, позволяющий одновременно оценивать неопределенности модели и внешние возмущения, тем самым повышая способность системы противостоять возмущениям.
2. Предложена поверхность скользящего режима с логарифмическими нелинейными функциональными членами для ускорения сходимости ошибки вблизи начала координат, а также устранения стационарных ошибок посредством интегральной компенсации.
3. Предложен адаптивный закон быстрого достижения на основе обратной связи состояния скользящего режима, устанавливающий нелинейное отображение между скольжением.
Симуляция
Этот раздел фокусируется на проверке эффективности предложенной схемы NESO-AITSMC через численные симуляции. CDCR используется как объект управления, и реализуется его динамическая модель.
Проводится сравнительный анализ стратегий управления, включая NFTSMC и RITSMC, при условиях неопределенностей модели и внешних возмущений.
Для оценки производительности контроллера по подавлению возмущений во время t=4–5 с применяется переменное во времени внезапное контактное возмущение. Результаты показывают, что все контроллеры демонстрируют увеличение ошибок отслеживания после возмущения, но предложенный контроллер достигает наименьших отклонений. Максимальные позиционные ошибки рабочего органа в направлениях XYZ составляют ±3,433 мм, ±0,275 мм и ±0,657 мм, что соответствует улучшению на 51,4%, 28,2% и 54,8% по сравнению с лучшим базовым вариантом.
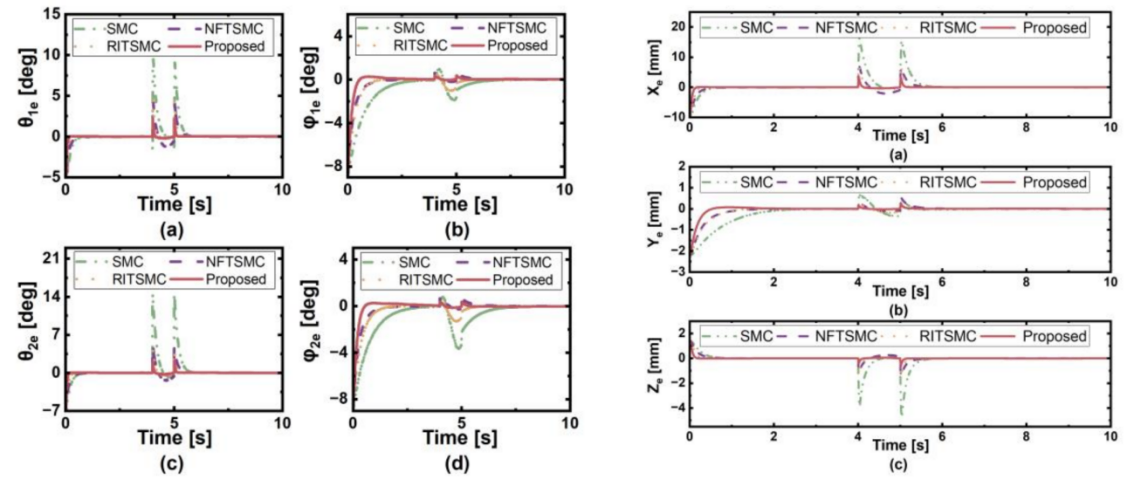
Сравнение ошибок углового отслеживания нескольких контроллеров при внезапных возмущениях
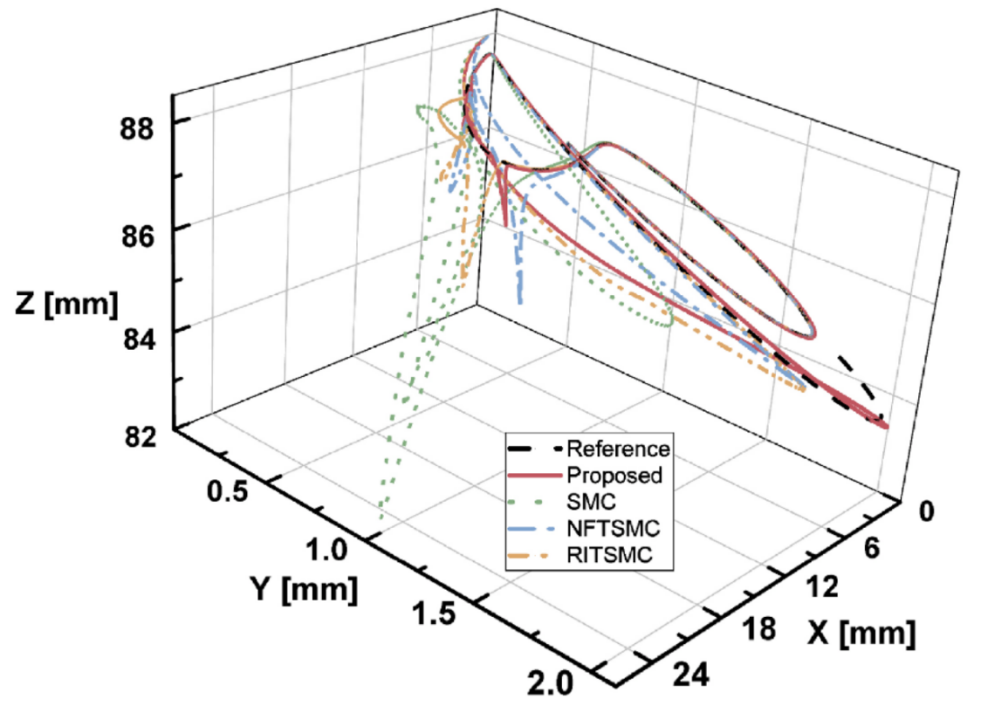
Сравнение 3D движения нескольких контроллеров при внезапных возмущениях.
Эксперимент
Эксперимент по отслеживанию траектории
Система экспериментальной верификации состоит из трех основных компонентов.
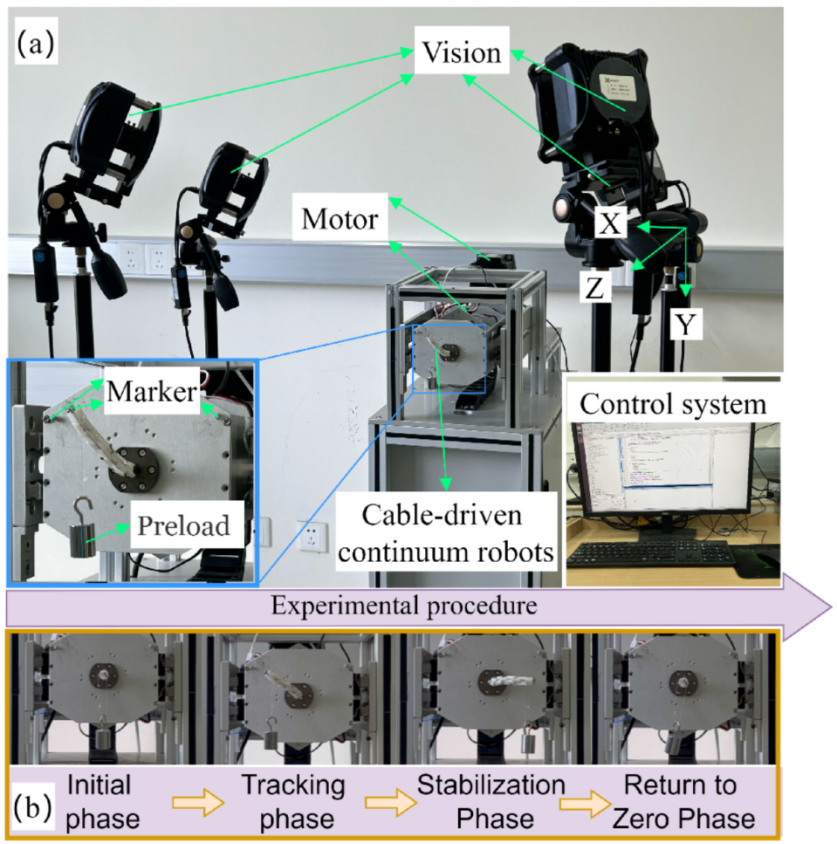
Эксперимент по отслеживанию траектории. (a) экспериментальная установка. (b) экспериментальная процедура
(1) Бионический континуальный механический корпус: Единицы позвонков PLA, изготовленные с использованием технологии послойного наплавления, формируют бионическую гибкую структуру диаметром 10 ммr и эффективной длиной 88 мм.
(2) Высокоточная система захвата движения: Оснащена шестью камерами захвата движения NOKOV, обеспечивает измерение позиции рабочего органа.



