
Аннотация: Исследовательская группа из Шэньчжэньского кампуса Харбинского технологического института (HITSZ) предложила новую систему SLAM для подводной среды, обеспечивающую надежную и точную локализацию с шестью степенями свободы (6-DoF).
Исследовательская команда из Шэньчжэньского кампуса Харбинского технологического института опубликовала статью под названием "RUSSO: Надежный подводный SLAM с оптимизацией сонара против визуальной деградации" в журнале IEEE/ASME Transactions on Mechatronics (TMECH), которая также была принята на IROS 2025.
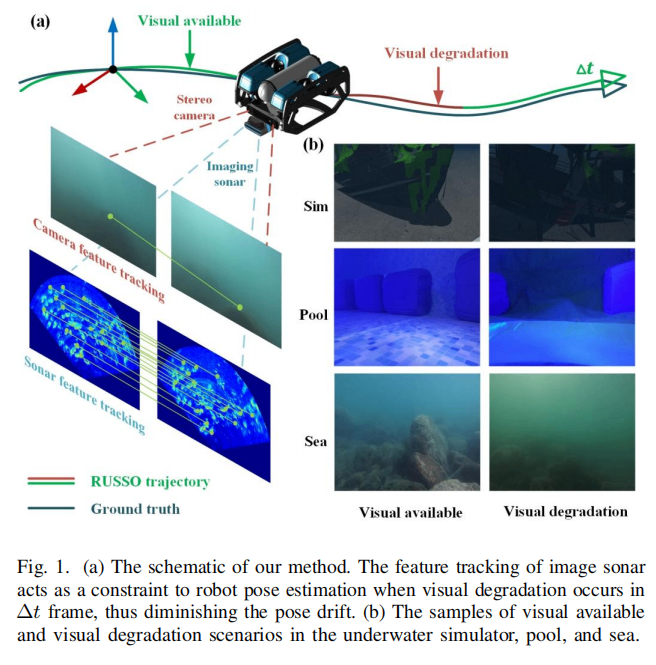
Решая проблему визуальной деградации в подводной среде, данная статья представляет впервые надежную систему подводного SLAM под названием RUSSO, которая бесшовно объединяет стереокамеру, ИНС и визуализирующий сонар для точной оценки состояния с 6-DoF. В лабораторных экспериментах система захвата движения NOKOV (подводная) предоставила высокоточные эталонные позиции для подводного робота, что позволило оценить точность и надежность системы RUSSO.
Цитирование
S. Pan, Z. Hong, Z. Hu, X. Xu, W. Lu and L. Hu, "RUSSO: Robust Underwater SLAM With Sonar Optimization Against Visual Degradation," in IEEE/ASME Transactions on Mechatronics, vol. 30, no. 6, pp. 5456-5467, Dec. 2025, doi: 10.1109/TMECH.2025.3550730.
Фон
Подводная среда представляет уникальные проблемы для систем SLAM, которые редко встречаются на суше или в воздухе, такие как недоступность GPS, быстрое изменение освещения из-за затухания света и отсутствие структур и особенностей в открытой воде. Для решения этих проблем стратегии мультимодального сенсорного слияния широко используются в существующих методах подводного SLAM.
Вклад
1. На момент написания данной работы это первое исследование SLAM, которое объединяет визуализирующий сонар со стереокамерой и ИНС для подводного применения.
2. Предложен новый метод оптимизации распространения ИНС, который использует оценки позы сонара для предоставления хорошего приоритета во время визуальной деградации, тем самым повышая точность распространения ИНС и уменьшая дрейф локализации.
3. Для решения проблем с инициализацией в сложных визуальных условиях предложен надежный метод инициализации SLAM, который напрямую использует относительную позу, оцениваемую между двумя последовательными кадрами визуализирующего сонара.
4. Обширные эксперименты — от подводных симуляторов до реальных лабораторных бассейнов и открытых морских сред — подтвердили надежность и точность предложенной системы RUSSO в условиях визуальной деградации.
Методология
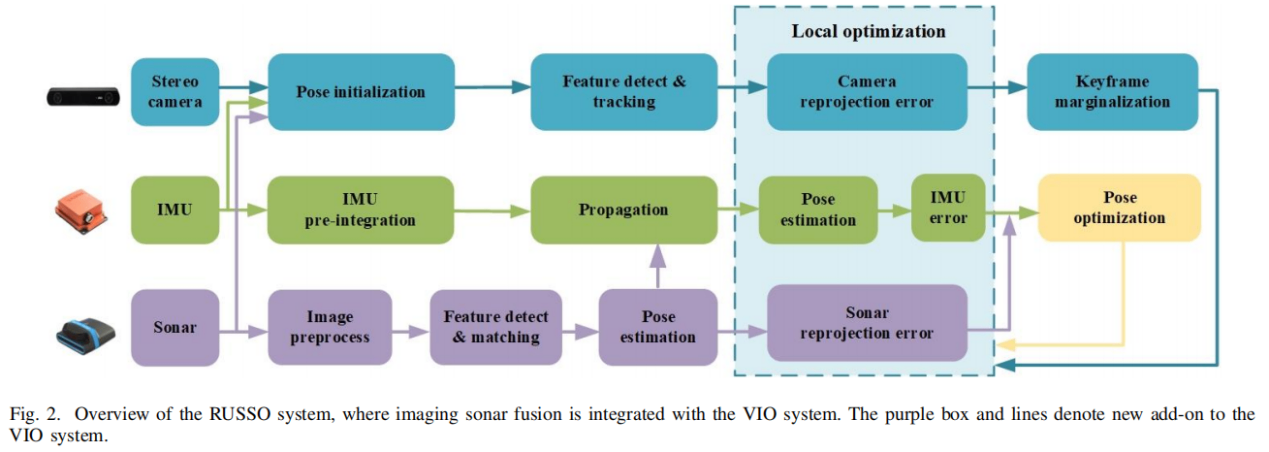
На основе фреймворка визуально-инерциальной одометрии (VIO) предложенная система RUSSO интегрирует визуализирующий сонар. Представлен новый метод оптимизации распространения ИНС: когда визуальная деградация приводит к ухудшению оценок позы, оценки позы сонара используются для предоставления хорошего приоритета для распространения ИНС, тем самым повышая надежность. Кроме того, когда визуальные особенности недостаточны во время инициализации SLAM, эта работа использует визуализирующий сонар для выполнения инициализации.
Лабораторные эксперименты

В экспериментах RUSSO сравнивалась с современным алгоритмом подводного SLAM SVIn2 (использующим только камеру и ИНС) и алгоритмом VIO VINS-Fusion.
Система захвата движения NOKOV (подводная) предоставила высокоточные эталонные позы для подводного робота в следующих лабораторных экспериментах, что способствовало сравнению производительности алгоритмов.
1. Сравнение алгоритмов: В подводных экспериментах с визуальной деградацией RUSSO продемонстрировал наибольшую точность локализации и согласованность карты во всех последовательностях. Он оставался стабильным даже в периоды сильной визуальной деградации, значительно превосходя SVIn2 и VINS-Fusion.
2. Проверка инициализации: В сценариях с отсутствием визуальных особенностей RUSSO успешно выполнил инициализацию с помощью сонара и сохранил высокую точность, тогда как SVIn2 не смог инициализироваться, а VINS-Fusion проявил значительный дрейф из-за неточных начальных значений.
3. Оптимизация распространения ИНС: Включение оценок позы сонара как приоритета во время визуальной деградации позволило RUSSO эффективно уменьшить ошибку распространения ИНС и повысить стабильность оценки состояния в условиях деградации. Даже после удаления визуальной информации система сохранила базовую способность локализации, хотя ошибки увеличились для некоторых степеней свободы.
Заключение
В этом исследовании были проведены обширные эксперименты в симуляционных средах, лабораторных бассейнах и мелководных зонах. Результаты показывают, что RUSSO превосходит два других передовых алгоритма визуально-инерциального SLAM во всех экспериментальных сценариях. Предложенный метод эффективно повышает точность оценки угла рысканья для подводных задач на почти постоянных глубинах, таких как подводное исследование и картирование.
Система захвата движения NOKOV (подводная) предоставила высокоточные эталонные позы для подводного робота в данном исследовании, что позволило количественно оценить точность и надежность системы RUSSO.



