
Исследовательская группа под руководством профессора Юань Чена из Шаньдунского университета (Вэйхай) недавно опубликовала статью под названием «Управление скользящим режимом с переменным демпфированием на основе пассивности для устройства компенсации волнового движения с приводом от троса в условиях гибридных возмущений» в журнале Information Sciences, который был индексирован SCI и EI.
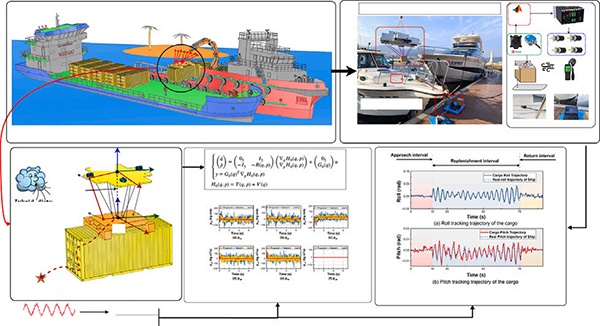
В задачах морской дозаправки и океанотехнических работ устройства компенсации волнового движения с приводом от троса сталкиваются с множеством проблем управления, вызванных сильными возмущениями и средами с низким демпфированием. В данной статье предлагается метод управления скользящим режимом с переменным демпфированием на основе пассивности, обеспечивающий унифицированный дизайн для конечного времени сходимости, подавления вибраций и отслеживания траектории. Система захвата движения NOKOV предоставила высокоточные данные о 3D-позе нагрузки для лабораторных экспериментов, служа эталоном для замкнутой обратной связи контроллера и оценки производительности.
По сравнению с существующими методами скользящего режима, предложенная структура демонстрирует большую адаптивность при работе с различными массами полезной нагрузки, более высокую устойчивость в шумных и ограниченных средах и лучше соответствует практическим требованиям компенсации волн и других приложений подвесных CDPR.
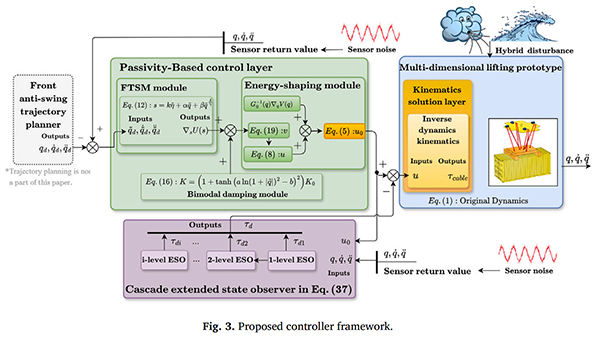
1. В данной статье предлагается контрольная структура на основе портового гамильтониана, которая одновременно учитывает ограничения ускорения подвесных тросовых конструкций и насыщение привода.
2. Разработана новая синергетическая структура управления для повышения антираскачивания и производительности отслеживания траектории посредством интеграции входных данных скользящего режима и модуляции демпфирования.
3. Предложена бимодальная стратегия насыщения демпфирования, использующая гиперболическую тангенциальную функцию для балансировки скорости сходимости и подавления раскачивания.
4. Разработан каскадный наблюдатель конечного времени для подавления шума датчиков и быстрого восстановления возмущений.
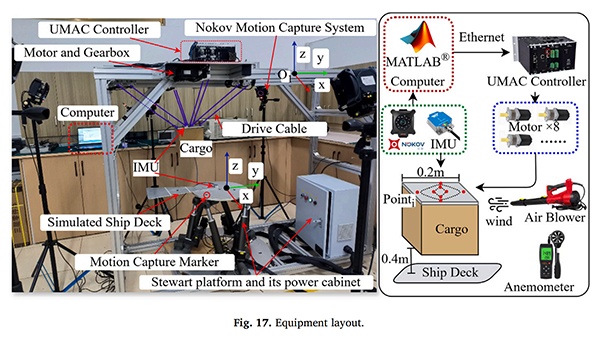
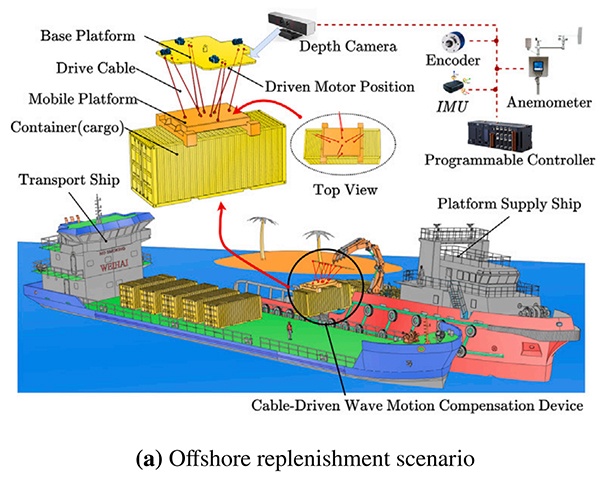
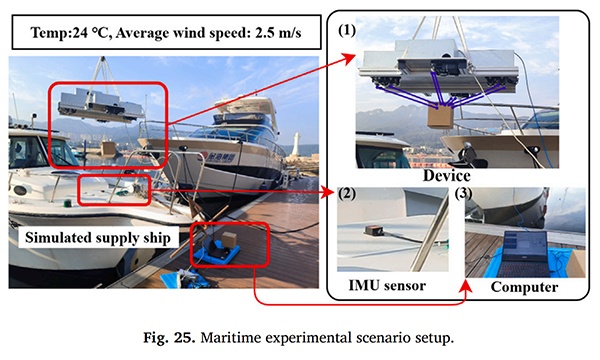
В лабораторных экспериментах исследовательская группа создала прототип устройства компенсации волн с масштабом 1:10 и пятью степенями свободы, включающий восьмитросовую систему, с шестистепенной параллельной платформой, моделирующей движение судна. Прототип интегрировал контроллер движения UMAC, обеспечивая связь через MATLAB/Simulink с IMU-датчиками и системой захвата движения NOKOV для синхронизации реального времени обратной связи по позе. Устойчивость метода и возможность его инженерного применения были дополнительно подтверждены испытаниями морской дозаправки в реальных условиях ветра и волн.
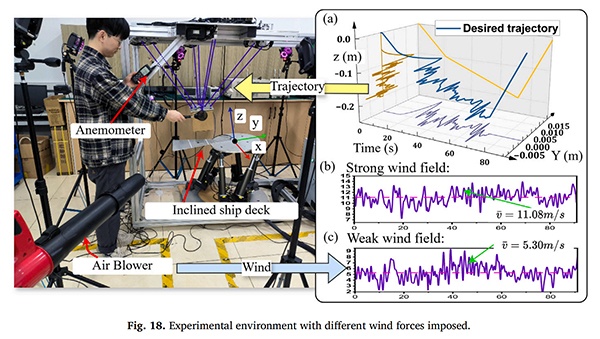
Результаты показывают, что при сопоставимом потреблении энергии управления предложенный метод снижает индекс ITAE (интеграл времени, взвешенный по абсолютной ошибке) примерно на 58–68%. В реальных морских испытаниях, при воздействии ветра со скоростью 5–10 м/с, средние ошибки отслеживания положения и ориентации были снижены более чем на 55%.
Система захвата движения NOKOV предоставила высокоточные данные о 3D-позе нагрузки для лабораторных экспериментов, служа эталоном для замкнутой обратной связи контроллера и оценки производительности.
Профили авторов
Хоу Цзунбинь, аспирант, Школа низкоуровневых наук и техники, Шаньдунский университет. Основные области исследований: проектирование и управление роботами с параллельной кабельной передачей.
Суй Жуйхао, аспирант, Школа низкоуровневых наук и техники, Шаньдунский университет. Основные области исследований: проектирование и управление роботами с параллельной кабельной передачей.
Юань Чен (ответственный автор), профессор и заместитель декана, Школа механики, электроники и информационной инженерии, Шаньдунский университет. Основные области исследований: механизмы роботов и управление движением.



