
Понимание и воспроизведение биологических механизмов движения представляет собой серьезную задачу в области подводной робототехники. Природные пловцы, такие как быки-лягушки и морские скаты, демонстрируют высоко координированные многосуставные движения, которые трудно моделировать и проверять с помощью традиционных датчиков.
Вдохновленный биологическими механизмами передвижения в природе Юйчэнь Чжу из Северо-восточного университета предложил и проверил два новых подхода к движению подводных роботов, используя задние конечности быка-лягушки и грудные плавники морского ската как биомиметические прототипы.
Точные данные о реальном движении необходимы для оценки биомиметических механизмов в реальных гидродинамических условиях, обеспечивая, чтобы конструкции роботов точно воспроизводили биологическое движение и достигали эффективного движения.
В этом исследовании была использована оптическая система захвата подводного движения для получения точных трехмерных данных о движении как биологических образцов, так и биомиметических роботизированных прототипов. В описанных экспериментах система была реализована с использованием решения NOKOV для захвата подводного движения.
Отражающие маркеры были стратегически прикреплены к ключевым суставам и структурным компонентам. Система позволила:
Высокочастотный захват изменений углов суставов
Точное восстановление подводных траекторий и положений
Прямое сравнение между биологическим движением и механическим подражанием
Количественную проверку моделей симуляции в реальных условиях потока жидкости
Захваченные данные о движении были синхронизированы с измерениями силы подводного шестиосевого движения, предоставляя комплексную систему оценки производительности движения.
Чжу, Юйчэнь, и др.Проектирование и реализация биомиметической системы движения подводного робота, вдохновленной движениями задних лап быка-лягушки.Biomimetics, 10(8), 498, 2025.
Это исследование фокусируется на механизме передвижения задних лап быка-лягушки и представляет биомиметическую систему подводного движения, основанную на трехступенчатой четырехзвенной связке, которая воспроизводит характерное движение «толчок–восстановление», наблюдаемое у настоящих лягушек.
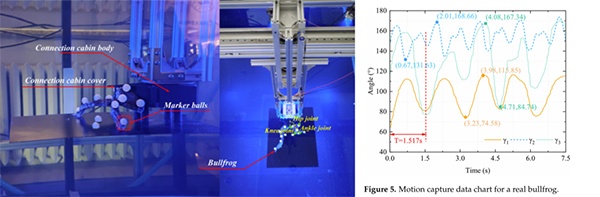
Захват кинематических данных о движениях задних лап быка-лягушки с использованием системы захвата подводного движения NOKOV
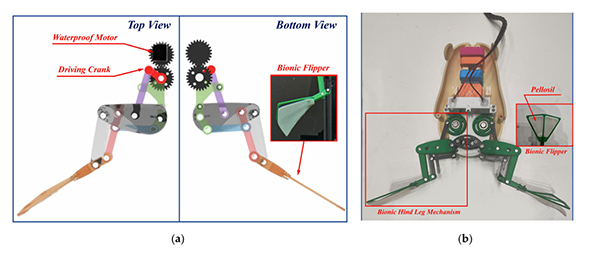
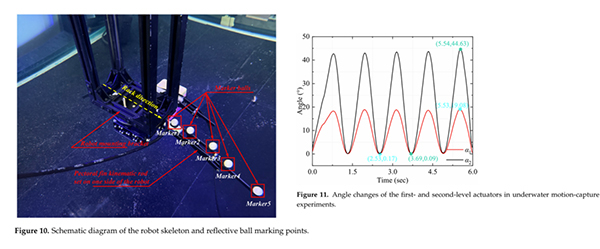
Прототип биомиметического механизма движения задней лапы, вдохновленного лягушкой, спроектированного с использованием трехступенчатой четырехзвенной связки и перепончатой ступни для эффективного подводного толчка.
Захват движения: Шесть подводных камер отслеживали отражающие маркеры, размещенные на бедре, голени и перепончатой ступне как биологического образца, так и биомиметического прототипа, позволяя получать высокоразрешающие траектории суставов в погруженных условиях. Установка захвата движения была реализована с использованием оптической системы захвата подводного движения, предоставленной NOKOV.
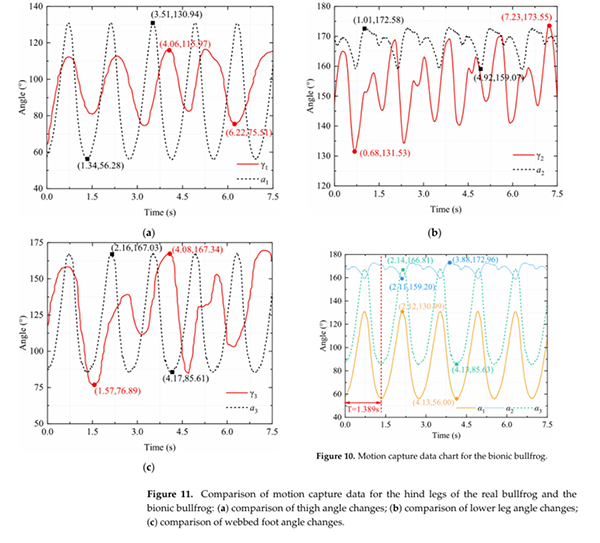
Сравнение угловых траекторий между реальной задней лапой быка-лягушки и биомиметическим прототипом задней лапы; демонстрация сходства движений и проверка дизайна связки.
Захват данных: Траектории суставов были захвачены с высоким временным разрешением для сравнения механического движения с биологическими эталонными данными.
Шестиосевые подводные измерения силы: Тяга биомиметического прототипа была записана, показывая среднюю тягу 2,65 Н и пиковую тягу 7,91 Н.
Результат: Сходство движений между биомиметическим прототипом и реальной задней лапой быка-лягушки было количественно определено на уровне 98,5%, проверяя механический дизайн.
Чжу, Юйчэнь, и др.Проектирование и исследование производительности шестизвенного механизма подводного робота на основе бионики морского ската.Журнал морских наук и инженерии, 13(6), 1156, 2025.
Вдохновленный колебательным движением грудных плавников морского ската, это исследование предлагает биомиметического подводного робота, основанного на шестизвенном механизме связки типа Ватта.
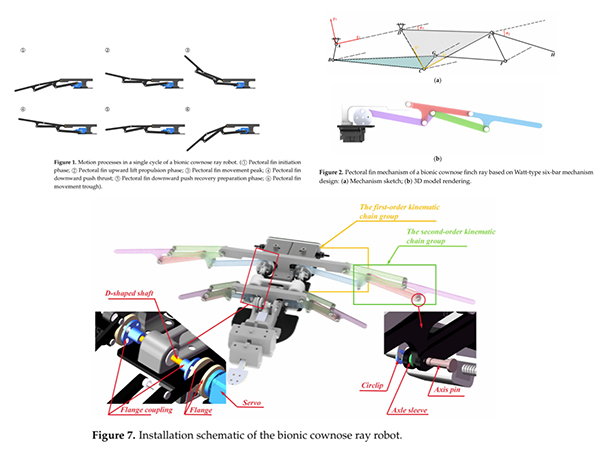
Дизайн биомиметического подводного робота морского ската на основе шестизвенного механизма связки типа Ватта
Захват движения:Кинематические симуляции подтвердили осуществимость предложенного механизма. В экспериментах с подводным прототипом система захвата подводного движения была использована для измерения фактического движения шестизвенной связки.
Захват данных: Система позволила точно записывать и анализировать движение биомиметического робота морского ската в погруженных условиях. Экспериментально полученные угловые траектории тесно совпадали с результатами симуляции, с незначительными расхождениями, главным образом, обусловленными гидродинамическим сопротивлением.
Система захвата подводного движения NOKOV была использована для записи и анализа движения биомиметического робота морского ската.
Sистема измерения шестиосевых сил:Дальнейшие измерения шестиосевых сил продемонстрировали, что робот может создавать прямую тягу и боковые силы в режимах синхронного и противофазного взмаха соответственно, указывая на сильную производительность движения и управляемую маневренность.
Результат: Система точно захватила реальные подводные траектории и положения биомиметического робота, позволяя проверить модели симуляции и всесторонне оценить производительность движения и стабильность шестизвенного биомиметического подводного робота.
Этот пример исследования демонстрирует, как высокоточный захват подводного движения может служить эталоном для проверки биомиметических механизмов движения, сокращая разрыв между биологическими наблюдениями, механическим проектированием и оценкой гидродинамической производительности.
Юйчэнь Чжу
Аспирант, Школа машиностроения и автоматизации, Северо-восточный университет
Основатель и CEO, Lindong Biomimetic Technology
Направление исследований: Биомиметическая подводная робототехника
Юйчэнь Чжу получил степень бакалавра технических наук в Северо-восточном университете в 2019 году и поступил в программу прямого обучения аспирантуры университета в 2023 году. Он был признан молодым лидером Азиатско-Тихоокеанского региона APEA и Глобальным формовщиком Давоса.
В 2021 году он основал Лабораторию биомиметического интеллекта в Северо-восточном университете, возглавив усилия в области исследований подводной биомиметической робототехники.
В ноябре 2023 года он основал Lindong Biomimetic Technology, которая получила инвестиции от MiraclePlus и Xiaomi Valley в 2024 году.
Он был включен в список Hurun U25 Пионеры предпринимательства в 2024 году и выбран для программы Поддержки молодых талантов Китайской ассоциации науки и технологий (докторская программа) в 2025 году.
Q: Почему система захвата подводного движения важна для исследований движения биомиметических роботов?
A: Она предоставляет эталонные кинематические данные, которые невозможно надежно получить только через симуляцию или бортовые датчики, позволяя точно проверять биомиметические механизмы движения в реальных гидродинамических условиях.
Q: Какие биомиметические механизмы анализируются в этом примере исследования?
A: Исследование рассматривает механизмы задних лап, вдохновленные лягушками, и механизмы грудных плавников, вдохновленные морскими скатами, экспериментально проанализированные с использованием захвата подводного движения для количественной оценки точности движения и производительности движения.
Q: Как исследователи проверяют производительность этих механизмов?
A: Захватывая 3D траектории суставов и сравнивая их с биологическими эталонными данными, а также измеряя силы тяги, исследователи могут оценивать сходство движений и механическую эффективность.



