Группа исследователей под руководством профессора Ли Сян из отдела автоматизации Университета Цинхуа предложила оптимизационную траекторию на основе генеративной модели для экзоскелетов верхних конечностей. Этот подход способен генерировать высокоперсонализированные траектории движения, обеспечивая безопасность и предоставляя персонализированное реабилитационное содействие пациентам, перенесшим инсульт. Соответствующая научная статья «Верхнеконечностная реабилитация с использованием двухрежимного персонализированного робота-экзоскелета: решение на основе генеративной модели» была опубликована в ведущем журнале по исследованиям в области робототехники The International Journal of Robotics Research.
В ходе исследования система захвата движения NOKOV использовалась для точного измерения данных об углах суставов здоровой конечности пациента, что позволило роботу-экзоскелету корректировать опорные траектории для пораженной стороны, тем самым способствуя персонализированному реабилитационному обучению.
Цитирование
Чэнь Юй, Мяо Шу, Е Цзин и др. Верхнеконечностная реабилитация с использованием двухрежимного персонализированного робота-экзоскелета: решение на основе генеративной модели. The International Journal of Robotics Research. 2025;0(0). doi:10.1177/02783649251333479
Фон
Экзоскелеты играют важную роль в реабилитации после инсульта. Однако существующие экзоскелеты для верхних конечностей ограничены в плане степеней свободы (DoF) и персонализированной помощи. Они не могут полностью соответствовать диапазону движений здорового человека или регулировать силы взаимодействия на основе обратной связи в режиме реального времени, что ограничивает качество и эффективность реабилитационного обучения. Для преодоления этих ограничений группа исследователей под руководством профессора Ли Сян разработала новую двухрежимную персонализированную систему экзоскелетов для верхних конечностей, направленную на предоставление индивидуальной поддержки реабилитации через свои онлайн-генеративные возможности.
Вклад
Данная статья представляет собой двухрежимный персонализированный подход на основе генеративной модели. Этот подход включает в себя предиктор намерений и детектор аномалий, предназначенные для фиксирования намерений движения неповрежденной стороны пациента и оценки безопасности и естественности взаимодействия человек-робот в реальном времени во время реабилитационных задач. В активном зеркальном режиме помощь отражает первоначальные намерения движения пациента. В пассивном следящем режиме помощь индивидуализируется на основе интерактивной обратной связи.
Общая структура
Общая архитектура нового экзоскелета для верхних конечностей включает его аппаратное обеспечение и программное обеспечение. В части аппаратного обеспечения робот оснащен шестью степенями свободы и использует серийные упругие приводы (SEAs) и кабельный механизм для достижения комплаентного привода и высокой безопасности. В части программного обеспечения робот принимает многоуровневую архитектуру управления: нижний уровень отвечает за управление движением и восприятие окружающей среды, тогда как верхний уровень работает на персональном компьютере, выполняя планирование движений и вычислительно сложные задачи. Все программы интегрированы в операционную систему роботов (ROS).
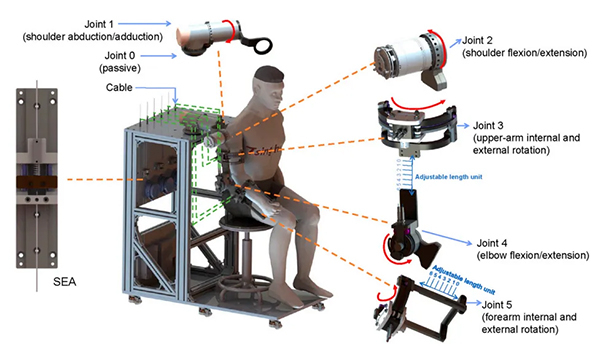
Рисунок 1 Обзор разработанного экзоскелета для верхних конечностей, который приводится в действие кабелями и состоит из пяти активных соединений (Соединения 1–5) и одного пассивного соединения (Соединение 0). Красные стрелки указывают направления положительных движений соединений.
Эксперименты
1. Эксперименты по активному зеркальному обучению
Для проверки эффективности предложенного метода в экспериментах по активному зеркальному обучению проводились тесты на внешнее воздействие, тесты на идентификацию аномальных областей и общее отслеживание движений. Во время экспериментов система захвата движения NOKOV использовалась для точного измерения данных об углах суставов здоровой конечности пациента, которые робот-экзоскелет использовал для корректировки опорных траекторий для пораженной стороны.
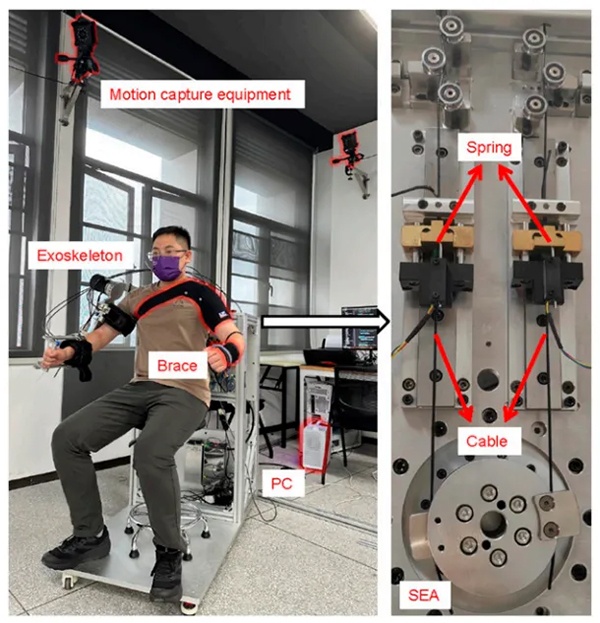
Рисунок 2 Экспериментальная установка в активном зеркальном режиме использовала оборудование захвата движения для получения обратной связи от неповрежденной стороны тела. SEA был сконструирован путем соединения выхода двигателя и конца соединения пружиной и кабелем.
Результаты экспериментов показывают, что уточнение траектории эффективно, соответствует требованиям реального времени для реабилитационного обучения и поддерживает хорошую стабильность в человеческо-роботизированном взаимодействии. Метод может эффективно отслеживать намерения движения, адаптироваться к непредвиденным изменениям и направлять робота в более безопасные зоны.
Эксперимент по активному зеркальному обучению
2. Эксперименты по пассивному следящему обучению
Для проверки эффективности предложенного персонализированного подхода в задачах пассивного следящего обучения проводились абляционные исследования, оценка эффективности персонализированной помощи и клинические испытания. В результате клинических испытаний экспериментальная группа показала значительные улучшения по всем показателям оценки по сравнению с их начальными результатами, включая снижение уровня мышечного тонуса и увеличение баллов по шкале Фугл-Мейера (FMA), что указывает на то, что пассивное следящее обучение ускорило восстановление двигательных функций.
Результаты экспериментов демонстрируют, что предложенный в данной статье метод ускорил восстановление двигательных функций, с существенными улучшениями как в уровне мышечного тонуса, так и в баллах FMA.
Клинический эксперимент
Система захвата движения NOKOV предоставила высокоточные данные об углах суставов конечностей для экспериментов по активному зеркальному обучению в этом исследовании, которые использовались для опорной траектории робота-экзоскелета, способствуя проверке эффективности предложенного метода.
Профили авторов
Юй Чэнь, отдел автоматизации, Университет Цинхуа, аспирант. Основные направления исследований: роботы-экзоскелеты, взаимодействие человек-робот.
Мяо Шу, отдел автоматизации, Университет Цинхуа, постдокторант. Основные направления исследований: роботизированная микроманипуляция, медицинская робототехника.
Е Цзин, Shenzhen MileBot Robotics Co., Ltd., соучредитель. Основные направления исследований: роботы-экзоскелеты, управление движением, искусственный интеллект.
Гун Чэнь, Shenzhen MileBot Robotics Co., Ltd., соучредитель. Основные направления исследований: реабилитационные и вспомогательные роботы-экзоскелеты, управление взаимодействием человек-робот, интерфейсы мозг-компьютер.
Цзянхуа Чэн, отдел реабилитации, Южно-Китайская Больница, Медицинский факультет, Университет Шэньчжэня, главный терапевт. Основные направления исследований: инновационные применения техник реабилитационной терапии.
Кэтэо Ду, отдел реабилитации, Южно-Китайская Больница, Медицинский факультет, Университет Шэньчжэня, заведующий отделением. Основные направления исследований: инновационные применения техник реабилитационной терапии.
Ли Сян (соответствующий автор), отдел автоматизации, Университет Цинхуа, доцент, научный руководитель. Основные направления исследований: ловкая манипуляция, взаимодействие человек-робот, медицинская робототехника, микро-роботы.