
В данной статье предлагается метод на основе физически информированной остаточной сети для коррекции модели магнитного диполя и высокоточной локализации, обеспечивающий надежный перенос из симуляции в реальные условия. Система захвата движения NOKOV используется для оценки точности и надежности предложенного алгоритма магнитной локализации в реальных средах.
На конференции IROS 2025 команда под руководством академика Шушан Го из Южного университета науки и технологий представила статью Физически информированная остаточная сеть для коррекции модели магнитного диполя и высокоточной локализации. В этой работе предлагается Физически Информированная Остаточная Сеть (PIRNet) для коррекции модели магнитного диполя и достижения высокоточной магнитной локализации, что обеспечивает надежный перенос из симуляции в реальные сценарии. Предложенный метод предоставляет решение высокоточной и недорогой локализации для роботов с магнитной навигацией, демонстрируя значительный потенциал применения в минимально инвазивной хирургической навигации и промышленном контроле.
Система захвата движения NOKOV используется для помощи в оценке точности и надежности предложенного алгоритма магнитной локализации в реальных условиях.
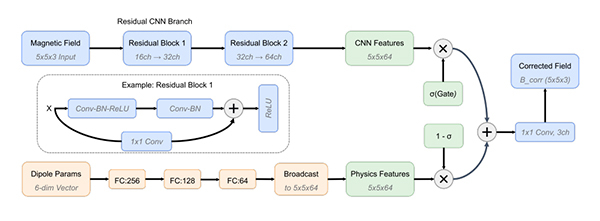
Архитектура физически информированной остаточной сети
Магнитная локализация является ключевой технологией для капсул эндоскопов с магнитной навигацией и магнитно управляемых роботов минимально инвазивной хирургии. Достижение высокоточной магнитной локализации зависит от создания точной модели магнитного поля источника магнитного поля. Однако классическая модель магнитного диполя показывает значительные отклонения в ближнем поле, что приводит к снижению точности локализации, особенно когда магнит находится близко к датчикам (на расстояниях менее восьми радиусов магнита). Кроме того, реальные факторы, такие как шум датчиков, температурный дрейф и внешние помехи, еще больше усугубляют несоответствие между прогнозами модели и реальными измерениями.
Хотя более точные аналитические модели могут повысить точность, они часто значительно увеличивают вычислительную сложность, что ограничивает их применимость в режиме реального времени.
Для решения проблем несоответствия модели данным, ограниченной обобщающей способности и узких мест производительности в реальном времени существующих подходов, в данной статье предлагается двухэтапная стратегия калибровки магнитной локализации на основе физико-данных. Основные вклады можно суммировать следующим образом:
1. Разработана физически информированная остаточная сеть (PIRNet) для исправления систематических отклонений в смоделированных данных с использованием теории магнитного диполя в качестве априори;
2. Используется оптимизированный интерполируемый метод таблицы поиска, который сочетает дистанционно взвешенную трилинейную интерполяцию со сферической линейной интерполяцией (Slerp) для достижения быстрого сопоставления с точностью до миллиметра.
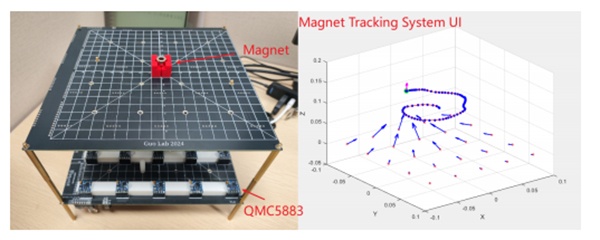
Экспериментальная платформа, включающая массив магнитометров (QMC5883), измерительную пластину и кольцевой магнит NdFeB (класс: N45, внешний радиус ro = 10 мм, внутренний радиус ri = 5 мм, длина L = 10 мм). Направление и длина синей стрелки в интерфейсе пользователя представляет направление и силу магнитного поля, обнаруженного каждым датчиком.
Эффективность предложенного метода проверена с помощью двухэтапной стратегии, сочетающей предварительное обучение на симуляциях и тонкую настройку на реальных данных. Сначала в рабочей зоне генерируется 58 320 смоделированных образцов на основе теории магнитного диполя с добавлением синтетического шума для имитации неидеальностей датчиков. Эти образцы используются для предварительного обучения PIRNet, что позволяет ей изучить основные физические характеристики магнитного поля.
Затем собирается небольшой набор реальных данных, состоящий из 288 пространственных конфигураций (всего 14 400 образцов), большинство из которых (11 520) используются для тонкой настройки. Эта стратегия снижает потребность в реальных данных более чем на 90%, достигая эффективного переноса из симуляции в реальность.
В реальных статических экспериментах скорректированная система достигает средней ошибки позиционирования 1,15 мм и угловой ошибки 1,01°. В динамических экспериментах средняя ошибка отслеживания составляет 0,7 мм с угловой ошибкой 1,07°. Система захвата движения NOKOV обеспечивает данные истинного положения с точностью до миллиметра в реальном времени, что позволяет точно оценивать производительность предложенного алгоритма в реальных условиях.
По сравнению с традиционным алгоритмом Левенберга–Марквардта (LM) и решениями глубокого обучения «конец в конец», предложенный метод сохраняет производительность в реальном времени (22,4 FPS), обеспечивая физическую интерпретируемость и устойчивость к внешним помехам. Более того, он требует значительно меньше реальных обучающих данных, чем чисто дата-ориентированные подходы.
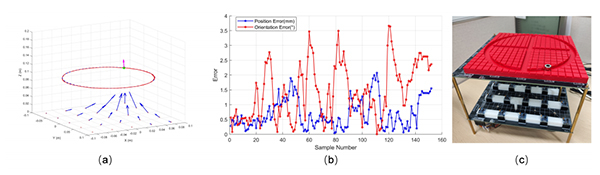
Тестирование повторяемой точности. (a) Трехмерная реконструкция траектории магнита, захваченной программным обеспечением управления, где синие и красные кривые представляют фактическое ручное перемещение и траекторию в реальном времени соответственно. (b) Ошибка отслеживания магнита. (c) Экспериментальная конфигурация для динамической проверки, включающая систему трассировки магнита, позволяющую выполнять ручные траектории.
Система захвата движения NOKOV предоставляет данные истинного положения с точностью до миллиметра в реальном времени для проверки точности и надежности предложенного алгоритма.
Мяозян Шень является магистрантом кафедры электроники и электротехники и Академического института океанографических исследований Южного университета науки и технологий. Его исследования сосредоточены на магнитных медицинских роботизированных системах.
Шушан Го является академиком Японской инженерной академии и профессором кафедры электроники и электротехники Южного университета науки и технологий. Его научные интересы включают микроробототехнику, микросистемы для осмотра сосудов, медицинские и биологические телеманипуляционные системы и интеллектуальные подводные роботы.
Чуньин Ли является ассистентом профессора и научным руководителем магистров Южного университета науки и технологий. Её научные интересы включают бионических роботов, амфибийных роботов, кооперацию многороботных систем, слияние данных многочисленных датчиков, подводную связь и совместную локализацию и навигацию.
Цзы Сюй Ван является постдокторским исследователем кафедры электроники и электротехники Южного университета науки и технологий. Его исследования сосредоточены на медицинских роботизированных системах для минимально инвазивной хирургии и гибких роботов с магнитным приводом.



