
Группа исследователей под руководством профессора Чжэнъю Ван из Технологического университета Хэфэй предложила метод сегментированного обучения на основе сетей Transformer для кинематического моделирования робота-манипулятора параллельной структуры, приводимого в движение тросами. Этот метод демонстрирует превосходную производительность и более высокую точность по сравнению с традиционными подходами к моделированию. Соответствующая научная статья под названием «Transformer-based segmented learning for kinematics modelling of a cable-driven parallel continuum robot» была опубликована в инженерно-техническом журнале Proc IMechE Part C: J Mechanical Engineering Science.
Оптическая система захвата движения NOKOV предоставила высокоточные данные о траектории движения робота для данного исследования, что способствовало проверке эффективности метода сегментированного обучения на основе Transformer.
Цитирование
Liu X, Wang Z, Li Z, Ma L, Wang D, Xu X. Transformer-based segmented learning for kinematics modelling of a cable-driven parallel continuum robot. Proceedings of the Institution of Mechanical Engineers, Part C. 2025;239(8):2942-2952. doi:10.1177/09544062241306683
Фон
Роботы параллельной структуры, приводимые в движение тросами (PCRs), обладают значительным операционным потенциалом в ограниченных пространствах и сложных средах благодаря своей структурной гибкости. Однако их кинематическое моделирование является сложным. Традиционные методы моделирования сталкиваются с такими проблемами, как высокая вычислительная сложность и ограниченная точность моделей. В последние годы всё больше применяются методы обучения на основе данных для кинематического моделирования таких роботов. Тем не менее, существующие методы обучения имеют недостатки при работе с множественными пространственными отображениями, что приводит к ограниченному уровню точности моделирования. Для решения этих проблем группа под руководством профессора Чжэнъю Ван из Технологического университета Хэфэй провела исследование по кинематическому моделированию робота параллельной структуры, приводимого в движение тросами.
Вклад
1. Предложен подход к кинематическому моделированию робота параллельной структуры, приводимого в движение тросами, основанный на обучении.
2. Применён алгоритм сегментированного обучения для систем с множественными пространственными отображениями в рамках данного подхода для снижения сложности обучения и повышения точности прогнозирования.
3. В рамках этого подхода использована сеть Transformer для улучшения возможностей моделирования между различными системными отображениями, эффективного выполнения задач регрессии и достижения точных прогнозов.
Объект исследования
В ходе исследования был разработан плоский робот параллельной структуры, приводимый в движение тросами (PCR) с тремя степенями свободы, включая перемещение и вращение в плоскости. Концевой эффектор робота имеет форму равностороннего треугольника и соединён с механизмом через блок связи. Механизм континуума использует одномерный дизайн.
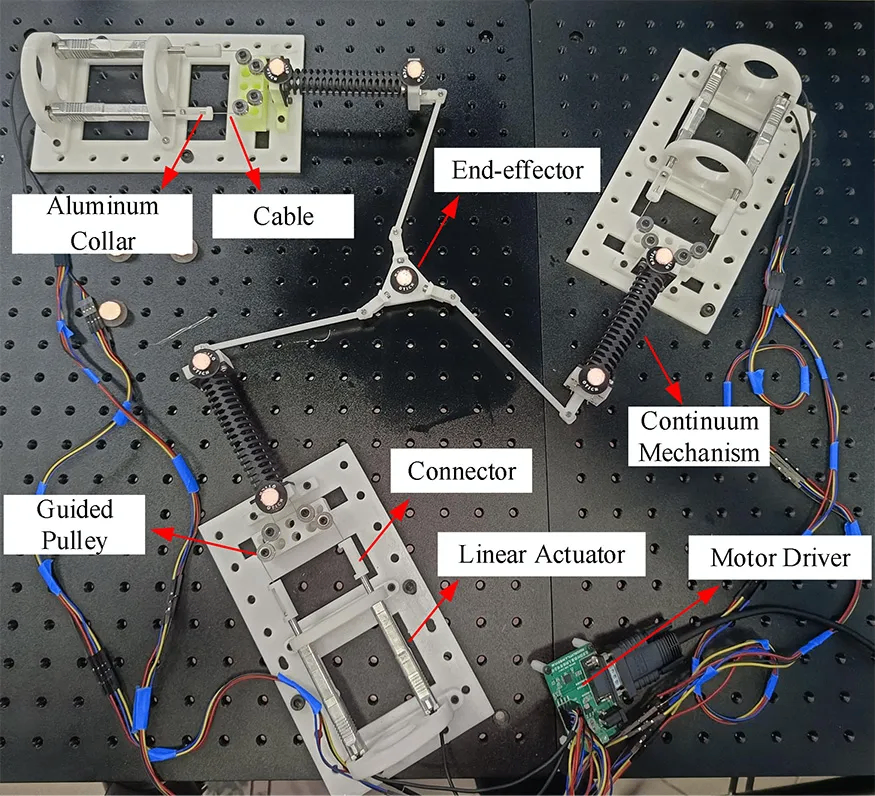
Рисунок 1 Структура PCR, в основном включающая концевой эффектор, механизмы континуума, тросы и линейные приводы.
Метод моделирования
Стратегия сегментированного обучения: Через сегментированное обучение исследование отдельно установило отображение из пространства задач в конфигурационное пространство (то есть от вектора положения концевого эффектора к вектору предсказания состояния механизма континуума) и отображение из конфигурационного пространства в пространство привода (то есть от вектора предсказания состояния механизма к вектору предсказания перемещения мотора).
Архитектура сети Transformer: Сеть Transformer используется в качестве базовой единицы сетевой архитектуры. Она реализует моделирование длинных последовательностей через механизм само-внимания и многослойную нейронную сеть, обеспечивая глобальную экстракцию контекстных признаков и возможность параллельных вычислений.
Через стратегию сегментированного обучения сеть Transformer может более точно захватывать отношения отображения между пространством задач, конфигурационным пространством и пространством привода.

Рисунок 2 Структура метода TBSL (Transformer-based Segmented Learning), включающего блоки нейронной сети Transformer и сегментированный фреймворк обучения от пространства задач к конфигурационному пространству и к пространству привода.
Эксперименты
Экспериментальная платформа: Установка включала робота параллельной структуры, приводимого в движение тросами, драйверы двигателей, калибровочный стержень и оптическую систему захвата движения NOKOV. Для захвата положения концевого эффектора робота и углов изгиба механизма континуума в реальном времени были размещены четыре камеры системы захвата движения Pluto 1.3C для проверки эффективности метода моделирования.
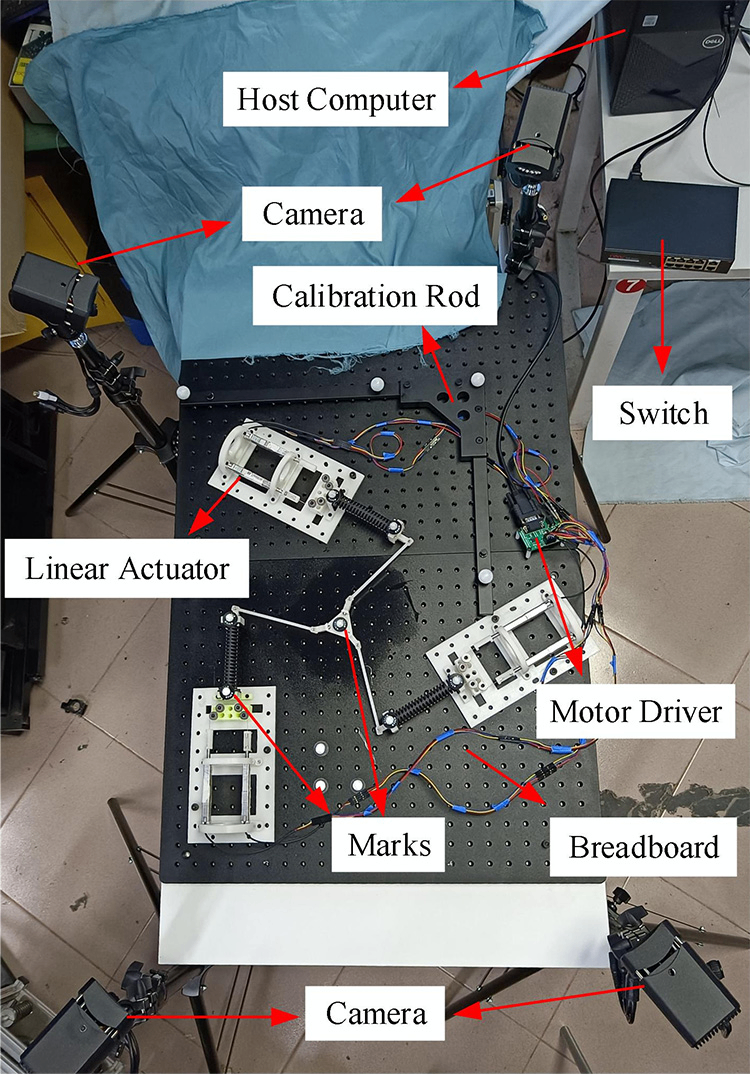
Рисунок 3 Экспериментальная платформа, включая робота параллельной структуры (PCR), камеры системы захвата движения NOKOV, драйверы двигателей и главный компьютер.
Дизайн эксперимента: Исследование спроектировало круговые и квадратные траектории для оценки точности отслеживания траектории предлагаемым методом и традиционными методами моделирования.
Результаты эксперимента: Метод сегментированного обучения на основе Transformer показал значительно меньшие максимальные ошибки, среднюю абсолютную ошибку (MAE) и среднеквадратичную ошибку (RMSE) как для круговых, так и для квадратных траекторий по сравнению с традиционными методами моделирования.
Эксперимент с роботом параллельной структуры (PCR)
Оптическая система захвата движения NOKOV предоставила реальные данные о траектории движения робота с точностью до долей миллиметра для анализа ошибок, подтвердив эффективность и превосходство нового метода моделирования.
Профиль авторов
Сючан Лю, аспирант, Школа машиностроения, Технологический университет Хэфэй. Основные области исследований: Роботы-манипуляторы, управляемые тросами, хирургические роботы континуума.
Чжэнъю Ван (соответствующий автор), доцент, научный руководитель магистрантов, Школа машиностроения, Технологический университет Хэфэй. Основные области исследований: Передовые роботы и интеллектуальное управление, жёстко-гибкие медицинские роботы, оборудование и системы роботизированного производства.
Цзыцянь Ли, аспирант, Школа машиностроения, Технологический университет Хэфэй. Основные области исследований: Роботы, искусственный интеллект.
Ле Ма, аспирант, Школа машиностроения, Технологический университет Хэфэй. Основные области исследований: Роботы-манипуляторы, управляемые тросами, исследовательские роботы континуума, искусственный интеллект.
Daoming Wang, профессор, научный руководитель докторантов, Школа машиностроения, Технологический университет Хэфэй. Основные области исследований: Робототехника и её применение, технология электронного управления тормозами автомобилей, интеллектуальные структуры и системы.
Xinzhou Xu, научный руководитель магистрантов, Школа Интернета вещей, Нанкинский университет почты и телекоммуникаций. Основные области исследований: Интеллектуальная обработка аудиосигналов, машинное обучение и искусственный интеллект.



