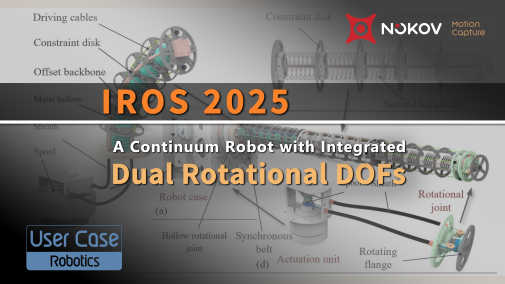
Команда профессора Жунцзе Кана из Тяньцзиньского университета представила робота с непрерывной кинематикой и интегрированными двумя вращательными степенями свободы на IROS 2025.
Спроектированный робот оснащен вращательным сочленением у основания руки для компенсации крутящего момента и еще одним на конце для полного управления конечным звеном с шестью степенями свободы. Предложенная кинематическая модель и система управления обеспечивают одновременное управление положением и ориентацией конечного звена в реальном времени. Экспериментальные результаты показывают что вращательное сочленение у основания может полностью компенсировать нежелательные крутильные деформации вызванные внешней нагрузкой. В эксперименте по отслеживанию траектории система захвата движения NOKOV записала фактический путь и результаты демонстрируют способность робота выполнять сложные операции. Демонстрация закрытия клапана подчеркивает его исключительную мобильность.
Это исследование продвигает развитие робототехники с непрерывной кинематикой и расширяет применение в области промышленного обслуживания взаимодействия человека и робота а также манипуляций в ограниченном пространстве.