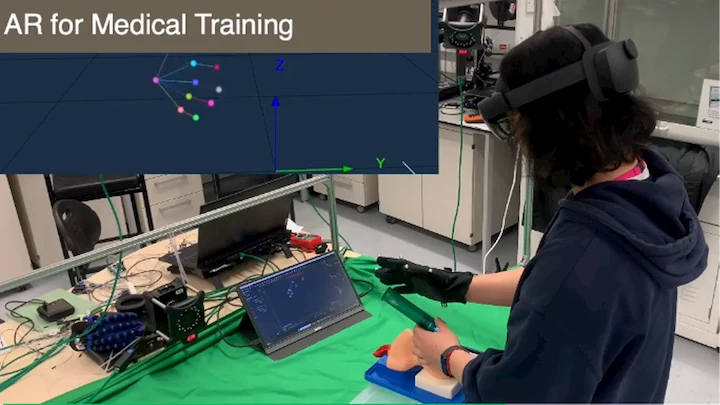
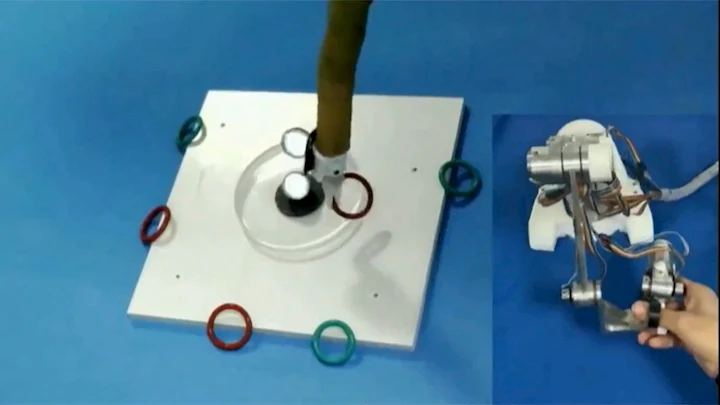
Применения в
медицинских роботах
Медицинский робот, телеуправление, планирование,
взаимодействие/сотрудничество человека и робота,
планирование траектории, роботизированная рука,
экзоскелет, носимые устройства, человеческое тело,
и роботизированная хирургия