Новая роботизированная система, которая помогает в минимально инвазивной хирургии в THYMO-полости, действует как "третья рука" хирурга, заменяя ассистента, который держит эндоскоп и тянет ткани, и может помочь хирургу самостоятельно завершить операцию. Гибкие хирургические инструменты обладают высокой степенью свободы и могут гибко подстраивать свои позиции, что делает их идеальными для выполнения хирургических задач в ограниченных рабочих пространствах. Однако избыточные степени свободы усложняют решение его кинематики.

С точки зрения балансировки сил, команда Фэн Мэй из Школы механической и аэрокосмической инженерии Университета Цзилинь предложила структуру гибкого хирургического инструмента с постоянным радиусом кривизны, который может быстро и точно реагировать на команды и удовлетворять требованиям управления "мастер-слейв" для операций в реальном времени. В целях проверки производительности гибкого хирургического инструмента при тонкой манипуляции исследователи провели экспериментальную проверку прототипа. В эксперименте главная рука врача управляла инструментом для захвата кольца в целевом положении, как показано на рисунке.

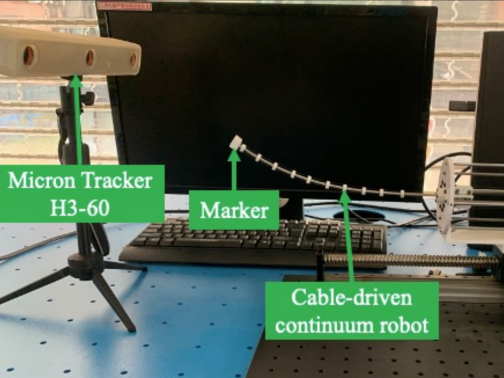
Исследовательская команда использовала систему захвата движения NOKOV для получения информации о траектории движения ведущей руки (управляемой врачом) и инструментов-слуг в режиме реального времени в качестве экспериментальных результатов, а также закрепила отражающие маркеры на ведущей руке и на конечном эффекторе инструмента соответственно.

Позиционные траектории движения основной руки и инструмента по направлениям x, y и z соответственно. Эксперименты показали RMSE 0.498, 0.399 и 0.051 для ожидаемых и фактических траекторий гибкого хирургического инструмента по направлениям x, y и z соответственно. Доказано, что механизм хирургического инструмента может успешно выполнять точные операции в режиме мастер-слуга.
Предложенный исследовательской группой метод кинематического решения не ограничен механической структурой и может быть применён к любому гибкому устройству с постоянным изгибом. В то же время гибкий хирургический инструмент эффективно улучшает точность и гибкость хирургической операции. Научная работа была опубликована на ICRA 2021.
Библиография:
[1] Фэн, М., Ни, Z.X., Ли, А., Лу, X. и Фу, Y.L. (2021), Оптимизация мастер-манипулятора для роботизированной ассистированной малоинвазивной хирургии. Int J Med Robot, 17: e2208. https://doi.org/10.1002/rcs.2208.