В данном исследовании предлагается новый алгоритм для надежной оценки состояния шагающих роботов — двойной бета-фильтр Калмана (Dual β-KF), который учитывает скорость проскальзывания стопы робота и изменения длины ноги, демонстрируя значительно лучшую устойчивость по сравнению с современными алгоритмами.
Система захвата движения NOKOV используется в реальных экспериментах для предоставления эталонной позиции шагающего робота, поддерживая проверку точности и устойчивости алгоритма, представленного в данной статье.
Цитирование
T. Zhang, W. Cao, C. Liu, T. Zhang, J. Li and S. E. Li, «Надежная оценка состояния для шагающих роботов с использованием двойного бета-фильтра Калмана», в IEEE Robotics and Automation Letters, том 10, номер 8, страницы 7955-7962, август 2025, doi: 10.1109/LRA.2025.3579619.
Научный контекст
Существующие алгоритмы оценки состояния для шагающих роботов, основанные на проприоцептивных датчиках, часто игнорируют проскальзывание стопы и деформацию ног в физическом мире, что приводит к большим ошибкам оценки. Для преодоления этого ограничения в данной статье предлагается двойной устойчивый оценочный фреймворк Dual β-KF. Этот фреймворк включает параметрический фильтр на основе статики, способный оценивать параметр длины ноги независимо от переменных состояния, и фильтр состояния β-KF, устойчивый к выбросам, вызванным проскальзыванием стопы, для оценки состояния робота.
Вклад данной работы
Для точного получения параметров длины ног исследовательская группа предлагает двойной оценочный фреймворк, который одновременно оценивает длину ноги с помощью параметрического фильтра и состояние робота с помощью фильтра состояния. Чтобы предотвратить накопление ошибок в этой двойной структуре, команда создала модель измерения статики ног для параметрического фильтра, которая оценивает длину ног только через моменты в суставах и силы контакта стопы, не полагаясь на информацию о состоянии.
Из-за низкой частоты проскальзывания стопы его можно рассматривать как выбросы в данных измерений. Для снижения влияния этих выбросов команда переосмыслила фильтр Калмана как решение задачи оценки максимума апостериорной вероятности (MAP) на основе расхождения Кульбака-Лейблера (KL). Переопределив функцию потерь оценки с использованием более устойчивого β-расхождения, команда разработала β-фильтр Калмана (β-KF), который снижает влияние проскальзывания стопы на точность оценки.
Объединив двойной оценочный фреймворк с β-KF, команда предложила новый алгоритм для надежной оценки состояния шагающих роботов, называемый двойным бета-фильтром Калмана (Dual β-KF). Эксперименты как в симуляции Gazebo, так и на реальном роботе Unitree GO2 показали, что предложенный метод значительно улучшает точность оценки по сравнению с современными алгоритмами проприоцептивной оценки состояния.
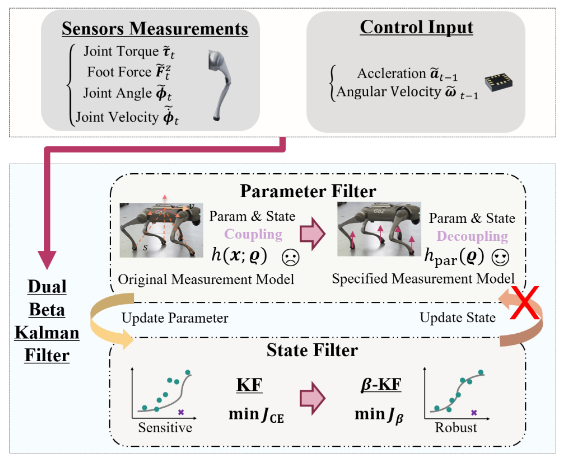
Рисунок 1: Обзор фреймворка Dual β-K. Данные проприоцептивных датчиков подаются в Dual β-KF, где сначала параметрический фильтр, независимый от состояния, оценивает параметры длины ног. Эти оценки затем используются устойчивым фильтром состояния для определения состояния робота.
1. Настройка эксперимента
В экспериментах команда сначала тестировала алгоритмы в симуляции Gazebo, а затем провела реальный эксперимент на роботе Unitree GO2.
Чтобы справедливо и четко проверить эффективность Dual β-KF, команда провела тщательную проверку двух его компонентов: β-KF и параметрического фильтра на основе статики. Для проверки β-KF команда выбрала QEKF, кватернионный EKF, и UKF-OR, UKF с отклонением выбросов, в качестве базовых линий. Кроме того, команда включила IEKF, итерационный EKF, который эквивалентен итеративному решению для оптимальной MAP-оценки, и Weight-KF в качестве абляционных экспериментов, чтобы продемонстрировать, что устойчивость β-KF не обусловлена MAP-оценкой или масштабом β-расхождения. Для оценки эффекта параметрического фильтра на основе статики команда сравнила Dual β-KF с Dual QEKF и QEKF с кинематической партийной калибровкой (показано как QEKF с [11] в Таблице 1).
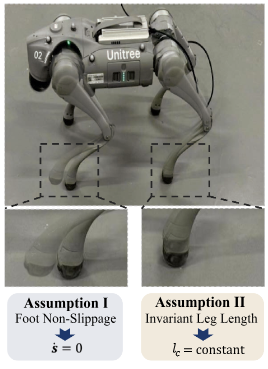
Рисунок 2: Шагающий робот, используемый для реальных экспериментов. Во время движения шагающего робота происходит проскальзывание стопы и динамические изменения длины ног.
2. Реальные эксперименты
В реальных экспериментах шагающий робот передвигается рысью по ровной поверхности, и во время движения собираются данные с датчиков, включая один ИМУ, 12 энкодеров суставов, датчики крутящего момента суставов и четыре датчика силы контакта стопы.
Система захвата движения NOKOV предоставляет эталонную траекторию робота, которая используется для сравнения с оценочной траекторией алгоритмов.

Рисунок 3: Система захвата движения NOKOV, используемая для предоставления эталонной траектории робота.
3. Результаты сравнения
В ходе проверки β-KF, как и ожидалось, базовый QEKF показывает наибольшую ошибку оценки из-за отсутствия обработки неточной модели измерений. Напротив, UKF-OR может эффективно подавлять выбросы измерений путем точной настройки порога, однако он не использует некоторую полезную информацию для обновления состояния, что приводит к большим ошибкам в определенные моменты. В отличие от них, предложенный β-KF автоматически присваивает низкие веса выбросам, позволяя лучше использовать информацию измерений. В результате β-KF значительно превосходит IEKF и Weight-KF, доказывая, что устойчивость β-KF не обусловлена MAP-оценкой или масштабом нового расхождения.
В ходе проверки двойного фреймворка Dual QEKF не только превосходит QEKF, но и превосходит QEKF с кинематической партийной калибровкой (показано как QEKF с [11] в Таблице 1), демонстрируя, что предложенный двойной фреймворк, учитывающий реальные изменения длины ног путем их оценки на каждом шаге, превосходит использование предварительно откалиброванной фиксированной длины ноги. Заметим, что Dual β-KF достигает наилучшей точности оценки, обеспечивая более чем 40% улучшение по сравнению с базовым QEKF.
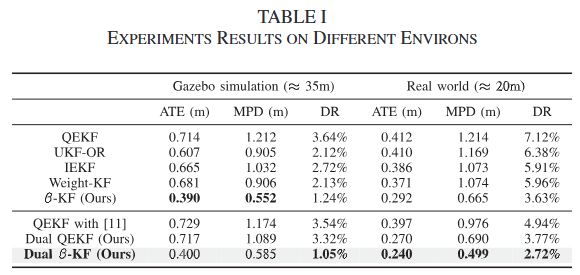
Таблица 1: Результаты экспериментов в разных средах
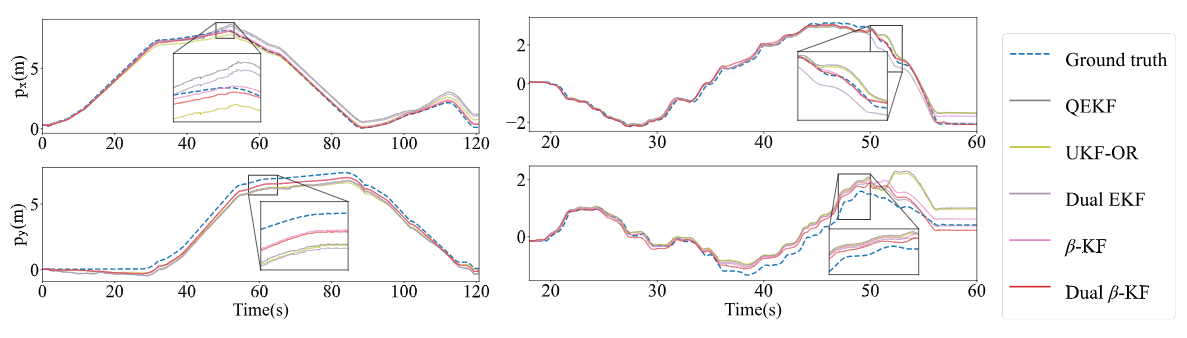
Рисунок 4: Результаты оценки положения для различных алгоритмов в симуляции (слева) и реальном эксперименте (справа). Для ясности в данной статье показаны только кривые для предложенных алгоритмов и двух базовых фильтров. Можно заметить, что предполагаемая траектория предложенных алгоритмов ближе к истинной траектории.
Система захвата движения NOKOV используется в реальных экспериментах для предоставления эталонной позиции шагающего робота, поддерживая проверку точности и устойчивости алгоритмов, представленных в данной статье.
Тяньи Чжан, аспирант Школы автомобилестроения и мобильности Университета Цинхуа. Основные направления исследований: оценка состояния роботов и управление, обучение с подкреплением и т.д.
Вэньхань Цао, постдок Национального университета Сингапура. Основные направления исследований: оценка состояния, обучение роботов и т.д.
Чан Лю, доцент и научный руководитель докторантов Школы передового производства и робототехники Пекинского университета. Основные направления исследований: воплощенная интеллектуальность, многороботное сотрудничество.
Тао Чжан, генеральный директор компании SunRisingAI Ltd. Основные направления исследований: воплощенная интеллектуальность, робототехнические системы.
Цзянтао Ли , главный научный сотрудник компании SunRisingAI Ltd. Основные направления исследований: воплощенная интеллектуальность, робототехнические системы.
Шэнбо Ли (ответственный автор), профессор и научный руководитель докторантов Школы автомобилестроения и мобильности и Колледжа искусственного интеллекта Университета Цинхуа. Основные направления исследований: автономные транспортные средства, воплощенные интеллектуальные роботы, глубокое обучение с подкреплением, проектирование нейронных сетей, оптимальное управление и оценка и т.д.