Недавно работа команды профессора Синьгуана Пэна из Школы морских наук и технологий Северо-Западного политехнического университета получила Премию за лучшую статью 2025 года журнала IEEE Robotics and Automation Letters (RA-L). Первым автором статьи является Ялунь Сян, аспирант Школы морских наук и технологий.
Статья была выбрана одной из пяти лучших статей из более чем 1700 опубликованных в RA-L в 2025 году, что отражает выдающийся вклад в область робототехники и автоматизации.
Награда будет объявлена на Церемонии награждения ICRA 2026, которая состоится 4 июня 2026 года с 12:30 до 14:00 в Вене Австрия.
Цитирование
Y. Xiang, J. Song, Z. Zheng, X. Lei и X. Peng, «Density-Driven Progressive Shape Formation for Swarm Robots in Dynamic Environments», в IEEE Robotics and Automation Letters, том 11, № 2, стр. 1186–1193, февраль 2026 г., doi: 10.1109/LRA.2025.3640978.
Обзор
Награжденная статья под названием «Density-Driven Progressive Shape Formation for Swarm Robots in Dynamic Environments» представляет новую управляемую плотностью систему управления для формирования формы в роевых роботизированных системах. Метод работает исключительно на основе локального восприятия, без необходимости коммуникации или распознавания личности между роботами и целями.
В реальных экспериментах система захвата движения NOKOV фиксировала высокоточные данные о положении роботов в режиме реального времени, служа критическим источником данных для управления движением роя и проверки алгоритмов.
Традиционные методы формирования формы роя обычно зависят от глобальной коммуникации, централизованного координатора, распознавания личности роботов или назначения целей один к одному. По мере увеличения числа роботов эти методы часто сталкиваются с проблемами, такими как высокая вычислительная сложность, ограниченная надежность системы и трудности развертывания.
1. Метод формирования формы роя без коммуникации на основе плотности
Исследовательская группа систематически внедряет механизм регулирования поля плотности в задачу формирования формы роботизированного роя. Имея только локальное восприятие, роботы могут коллективно создавать желаемую глобальную форму, значительно уменьшая зависимость крупномасштабных роевых систем от коммуникации и вычислительных ресурсов.
2. Прогрессивное автономное формирование морфологии роя
В статье предлагается механизм прогрессивного формирования формы. Регулируя один параметр эталонной плотности ρ₀, рой может плавно и непрерывно переходить между тремя морфологическими состояниями: формирование вокруг фигуры, двухслойное контурное формирование и формирование соответствующее границам.
Этот механизм позволяет роям роботов динамически регулировать толщину покрытия и прилегание к границам в соответствии с требованиями задачи, предоставляя новый подход к автономному управлению роем в сложных динамических средах.
3. Адаптивная способность при динамических изменениях размера роя
Метод может адаптивно корректировать структуру роя в зависимости от количества участвующих роботов. Даже если роботы внезапно добавляются, теряются или удаляются, система может быстро восстановить стабильное формирование, сохраняя точность формы и равномерность распределения, демонстрируя высокую надежность и масштабируемость.
Результаты показывают, что предложенная система управления на основе плотности не только достигает формирования статической формы, но и надежно адаптируется к динамическим изменениям размера роя, обеспечивая совместное участие роботов независимо от их добавления или потери.
1. Настройка эксперимента
Платформа SwarmBang для проверки роевых экспериментов состоит из примерно 100 настольных роботов, оптической системы захвата движения NOKOV, системы видеозаписи и сервера. Каждый настольный робот имеет размеры 60 мм × 60 мм × 60 мм.
В этой работе для экспериментальной проверки использовались 50 роботов. Каждый робот оснащен двумя шаговыми двигателями с максимальной скоростью 25 мм/с и радиочастотным модулем 2.4 ГГц для беспроводной связи с центральным сервером. Сервер используется для выполнения алгоритма формирования формы, расчета необходимой скорости и отправки команд управления роботам через настраиваемый протокол связи с фиксированными временными интервалами Δt.
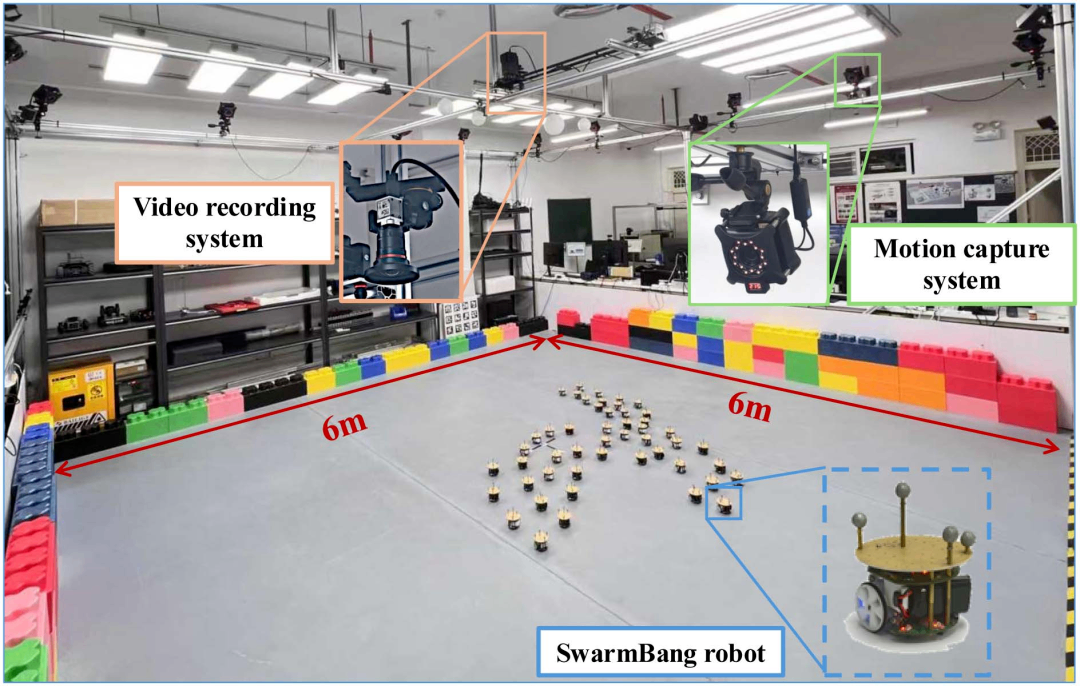
Платформа SwarmBang для проверки роевых экспериментов
2. Прогрессивное формирование формы роя роботов
Результаты показывают, что путем динамической настройки параметра плотности ρ₀ алгоритм обеспечивает плавные переходы между формированием вокруг фигуры, двухслойным контурным формированием и формированием соответствующим границам, демонстрируя высокую адаптивность и масштабируемость в практических применениях.
3. Формирование формы роя роботов при динамическом добавлении и удалении роботов
Результаты демонстрируют, что предложенный алгоритм может быстро адаптироваться к динамическим изменениям размера роя, таким как внезапное удаление или добавление роботов, сохраняя при этом точность формы и равномерность распределения.
В реальных экспериментах система захвата движения NOKOV фиксировала высокоточные данные о положении роботов в режиме реального времени от 50 роботов, служа критическим источником данных для управления движением роя и проверки алгоритмов.
Ялунь Сян является аспирантом Школы морских наук и технологий Северо-Западного политехнического университета. Его основные исследовательские интересы включают роевую робототехнику, формирование формы роя, самоорганизованное управление и роевой интеллект.
Цзинтао Сун является магистрантом Школы информационных и управляющих технологий Университета архитектуры и технологий города Сиань. Его основные исследовательские интересы включают роевую робототехнику и алгоритмы управления роем.
Жичэн Чжэн является аспирантом Школы морских наук и технологий Северо-Западного политехнического университета. Его основные исследовательские интересы включают роевой интеллект и роевую робототехнику.
Сяокан Лэй является доцентом и научным руководителем магистрантов Школы информационных и управляющих технологий Университета архитектуры и технологий города Сиань. Его основные исследовательские интересы включают роевую робототехнику и роевой интеллект.
Синьгуан Пэн (ответственный автор), является профессором и научным руководителем аспирантов Школы морских наук и технологий Северо-Западного политехнического университета. Его основные исследовательские интересы включают роевой интеллект, эволюционные вычисления, машинное обучение и их применение в беспилотных системах, особенно в беспилотных роях.