
Вдохновленные совместным манипулированием небольших организмов, таких как рыбы, птицы и муравьи, исследователи разработали системы многоагентного кооперативного транспортирования (MRCTS) для перемещения тяжелых и габаритных объектов, с которыми не может справиться один робот. Эти системы могут использоваться в таких сценариях, как поисково-спасательные операции, реагирование на чрезвычайные ситуации и военная логистическая транспортировка. Существующие MRCTS в основном перевозят грузы по ровным поверхностям и имеют мало возможностей для транспортировки объектов по пересеченной местности.
Исследовательская группа под руководством профессора Лю Синьцзюня из отдела машиностроения Университета Цинхуа предложила использование гусеничного мобильного робота (TMR) для повышения адаптации к местности и расширения сфер применения MRCTS.
Исследование под названием «Повышение адаптации к местности системы многоагентного кооперативного транспортирования за счет новых соединителей и оптимизированных стратегий сотрудничества» было опубликовано в журнале Frontiers of Mechanical Engineering и проиндексировано в базе SCI.
Система захвата движения NOKOV использовалась для сбора информации о положении лидирующего робота в режиме реального времени, помогая проверить производительность и эффективность предложенной стратегии кинематического управления в реальных условиях.
Формат цитирования
Лю, Цюань, Гун, Чжао, Ние, Чжэнгуо и Лю, Синьцзюнь. (2023). Повышение адаптации к местности системы многоагентного кооперативного транспортирования за счет новых соединителей и оптимизированных стратегий сотрудничества. Frontiers of Mechanical Engineering, 18, 1-19. https://doi.org/10.1007/s11465-023-0754-2
Основные моменты исследования
Был разработан новый шестистепенной пассивный адаптивный шарнир для соединения TMR и общего груза, что позволяет MRCTS адаптироваться к неровной местности. Кроме того, контактные датчики на адаптивном шарнире измеряют положение и ориентацию робота относительно объекта, обеспечивая обратную связь и решая проблему локализации роботов на открытом воздухе.
Предложен параллельный подход виртуального лидера и физических последователей. Виртуальный лидер описывает общее движение системы и управляет последователями, предотвращая отказ системы из-за поломки физического лидера. Все физические роботы в системе выступают последователями, помогая начать и поддерживать транспортировку, а также повышая устойчивость стратегии транспортировки к массе объекта.
Была представлена новая двухконтурная кинематическая система управления, где внутренний контур связан с управлением движением последователей, а внешний контур – с управлением движением виртуального лидера. Управление движением обоих типов роботов преобразуется в задачу слежения за траекторией для мобильных роботов.
Экспериментальная проверка
Исследовательская группа провела эксперименты по слежению за траекторией и транспортировке на неровной местности для проверки производительности контроллера в автономном режиме и адаптации MRCTS к местности в режиме дистанционного управления соответственно.
Эксперимент по кооперативной транспортировке по целевой траектории
Четыре TMR использовались для совместной транспортировки груза весом 60 кг при отслеживании круговой траектории. Система захвата движения NOKOV получала информацию о положении и ориентации лидера в зоне 4,5×4,5 м для обратной связи. Результаты показали, что ошибка отслеживания лидера сходилась к нулю за конечное время, демонстрируя эффективность контроллера в обеспечении способности системы следовать желаемой траектории, несмотря на начальные ошибки.
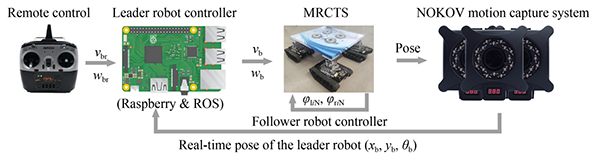
Экспериментальная установка и поток информации
Кооперативная транспортировка по неровному покрытию
MRCTS на основе TMR использовался для транспортировки груза весом 60 кг по неровной местности для проверки адаптации к местности. MRCTS работал в режиме дистанционного управления, где целевая скорость лидера рассматривалась как его контрольная скорость, а контроллеры последователей преобразовывали целевую скорость лидера в их собственные целевые скорости. Результаты показали, что MRCTS на основе TMR успешно перевозил груз по неровной местности, демонстрируя отличную адаптацию к местности и подтверждая эффективность конструкции адаптивного шарнира и стратегии управления.
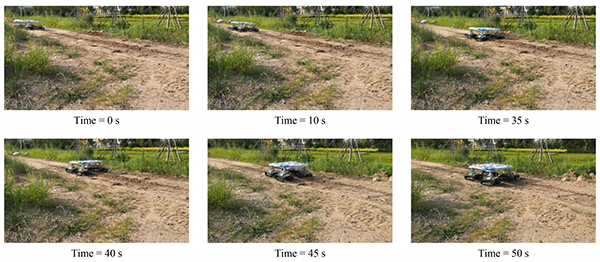
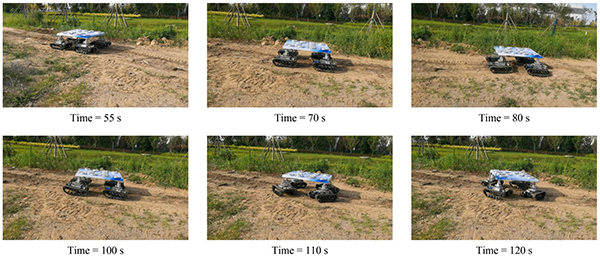
Экспериментальная последовательность кооперативной транспортировки по неровной местности
Система захвата движения NOKOV собирала информацию о положении и ориентации лидирующего робота MRCTS в реальном времени для обратной связи при управлении траекторией последователей, проверяя производительность и эффективность предложенной стратегии кинематического управления в реальных условиях.



