Команда из Института автоматики Китайской академии наук (CAS) предложила новый метод планирования траектории для гибридных роботов, выполняющих осмотр линий электропередач. Этот метод может генерировать траектории в течение 50 миллисекунд, значительно сокращая время, необходимое гибридным роботам для автономной посадки на линии электропередач и преодоления препятствий. Исследовательская статья «Модельное планирование траектории гибридного робота для осмотра линий электропередач» была принята IEEE RAL и IROS 2024.
Система захвата движения NOKOV предоставила высокоточные данные о позе для оценки состояния гибридного робота, поддерживая проверку эффективности предложенного метода в реальных условиях.
Цитирование
Z. Li и др., «Модельное планирование траектории гибридного робота для осмотра линий электропередач», в IEEE Robotics and Automation Letters, том 9, номер 4, страницы 3443-3450, апрель 2024, doi: 10.1109/LRA.2024.3363535.
Исследовательский контекст
Регулярные осмотры линий электропередач имеют решающее значение для обеспечения безопасной и надежной передачи электроэнергии, предотвращения опасностей и оптимизации эффективности сети. Роботы-лазальщики могут перемещаться по линиям электропередач, обеспечивая высокоточные и дальние осмотры, но им трудно избегать препятствий. Дроны предлагают высокую гибкость для осмотров, летая над линиями электропередач, но имеют ограниченную выносливость. Гибридные роботы стремятся объединить преимущества как роботов-лазальщиков, так и дронов, достигая высокой мобильности и увеличенной выносливости.
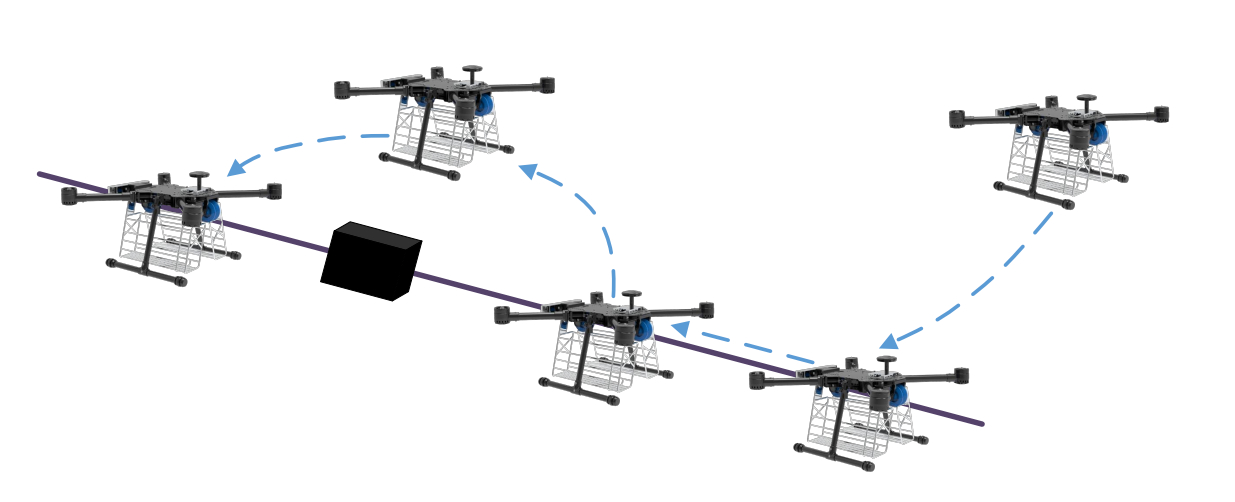
Диаграмма процесса осмотра линий электропередач гибридным роботом
Несмотря на потенциал гибридных роботов, большая часть исследований сосредоточена на проектировании платформ и автономной посадке, при этом недостаточно внимания уделяется планированию траектории, что является ключевым для автономных осмотров. В данной статье представлен новый подход к заполнению пробелов в планировании траектории для гибридных роботов. Проблема планирования траектории моделируется как задача нелинейного программирования, включающая динамические и геометрические ограничения как жесткие ограничения, а качество осмотра как функцию оптимизации затрат. Эффективность метода подтверждается обширными симуляциями и реальными экспериментами.
Вклады статьи
Предложен метод генерации траектории для осмотра линий электропередач гибридным роботом, значительно снижающий временные затраты на посадку и навигацию по избеганию препятствий.
Разработана общая геометрическая модель для осмотра линий электропередач гибридным роботом, включая аналитические формулы для точной посадки и максимизации видимости линий электропередач.
Предложенный метод проверен с помощью обширных симуляций и реальных экспериментов.
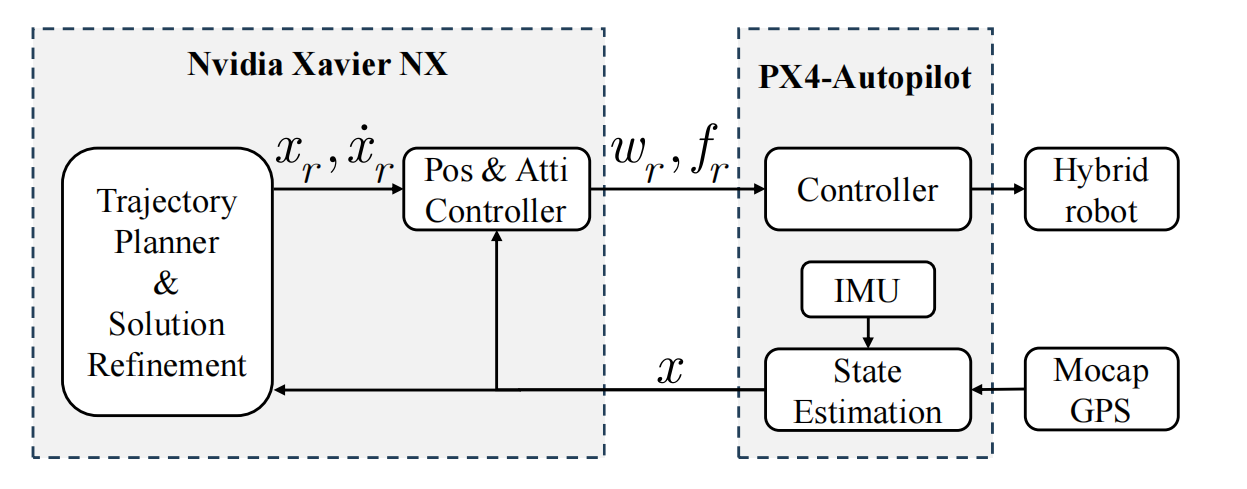
Экспериментальный процесс Исследовательская группа проверила предложенный метод планирования траектории на платформе гибридного робота. Система захвата движения NOKOV предоставила данные о позе робота, линиях электропередач и препятствиях, в то время как расширенный фильтр Калмана (EKF) использовался для оценки состояния робота.
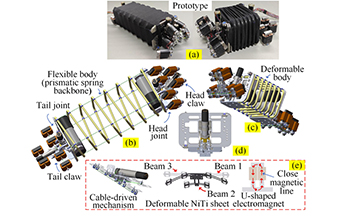
Структура системы гибридного робота
Чтобы проверить эффективность метода в реальных условиях, исследователи создали внутренний симулированный сценарий передачи электроэнергии с линиями электропередач и препятствиями, проводя эксперименты по планированию и отслеживанию траектории.
Экспериментальные результаты показали, что запланированная траектория удерживает робота прямо над и выровненным с линией электропередач, максимизируя видимость линии электропередач. В конечном итоге робот успешно преодолел препятствия и приземлился на линию электропередач.
Система захвата движения NOKOV, предоставляя высокоточные данные о позе, помогла в оценке состояния гибридного робота, подтверждая эффективность метода планирования траектории в реальных условиях.
Информация об авторах
Жишоу Ли, аспирант Лаборатории технологий промышленного зрения и интеллектуального оборудования Института автоматики CAS. Направление исследований: робототехника, беспилотные автономные системы.
Юньнун Тянь, ассоциированный исследователь Лаборатории технологий промышленного зрения и интеллектуального оборудования Института автоматики CAS. Направление исследований: специальные роботы, воплощенная интеллектуальность, визуальное сервоуправление.
Гоудун Ян, исследователь Лаборатории технологий промышленного зрения и интеллектуального оборудования Института автоматики CAS. Направление исследований: робототехника, беспилотные автономные системы.
Яньфэн Чжан, аспирант Национальной ключевой лаборатории мультимодальных искусственных интеллектуальных систем Института автоматики CAS. Направление исследований: робототехника, беспилотные автономные системы.
Энь Ли, исследователь Лаборатории технологий промышленного зрения и интеллектуального оборудования Института автоматики CAS. Направление исследований: технологии специальных роботов, технологии управления роботами, технологии интеллектуального восприятия.
Цзыцзе Лян, исследователь Национальной ключевой лаборатории мультимодальных искусственных интеллектуальных систем Института автоматики CAS. Направление исследований: передовое производство.
Минь Тан, исследователь Национальной ключевой лаборатории мультимодальных искусственных интеллектуальных систем Института автоматики CAS. Направление исследований: интеллектуальная робототехника, передовое управление.