1. Обзор проекта
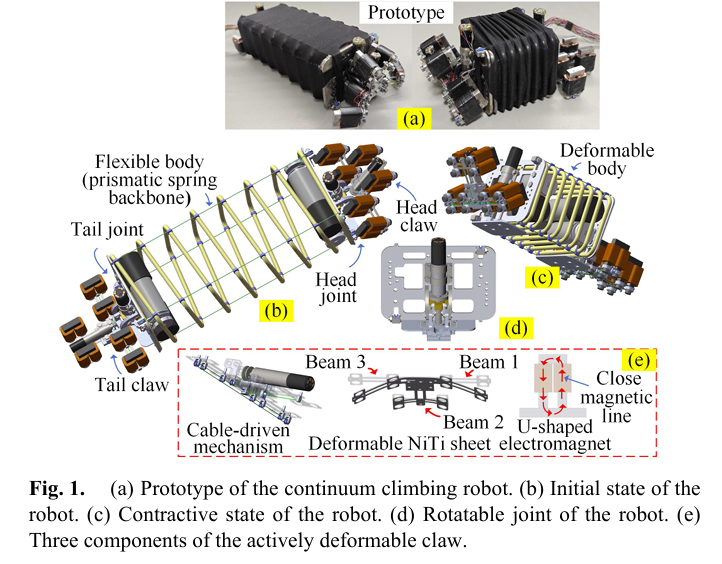
В данной статье представлен робот-альпинист континуума, предназначенный для осмотра ядерных установок, разработанный исследовательской группой профессора Жианвэня Чжао из Харбинского технологического института (Вэйхай). Робот имеет выдвижной призматический пружинный каркас. Кинетостатические модели разработаны и проверены с помощью конечно-элементного анализа и физических экспериментов с использованием системы захвата движения NOKOV 3D.
Робот-альпинист континуума предназначен для выполнения задач осмотра в ограниченных и прерывистых средах, таких как трубопроводы, сосуды под давлением и сложные поверхности оборудования, встречающиеся на ядерных объектах.
Робот имеет выдвижной призматический пружинный каркас, обеспечивающий непрерывное изгибание, осевое удлинение и стабильное перемещение по кривым и несплошным поверхностям.
Континуальные роботы движутся через непрерывную деформацию гибких каркасов, что делает их подходящими для осмотра в ограниченных и сложных средах, таких как трубопроводы и сосуды под давлением на ядерных объектах.
В сценариях ядерного осмотра роботы должны адаптироваться к криволинейным поверхностям, узким пространствам и прерывистым конструкциям. Традиционные жесткие или колесные роботы сталкиваются с ограничениями мобильности и адаптивности поверхности в таких условиях.
Существующие модели континуальных роботов часто основываются на предположениях о постоянной кривизне и круговых геометриях каркаса, что снижает точность при учете силы тяжести, внешних нагрузок или некруглых выдвижных конструкций. Кроме того, многие модели не могут обеспечить баланс между вычислительной эффективностью и точностью прогнозирования.
Поэтому все еще отсутствуют общие и эффективные методы кинетостатического моделирования для некруглых выдвижных пружинных каркасов, что ограничивает практическое использование континуальных роботов в задачах ядерного осмотра.
3. Вклад настоящего исследования
Данная работа исследует кабельно-приводной выдвижной призматический пружинный каркас для робота-альпиниста континуума, работающего в прерывистых средах осмотра.
Основные вклады:
Предложена выдвижная призматическая пружина, способная к всенаправленному изгибу, что обеспечивает стабильное перемещение и переходы между поверхностями в ограниченных пространствах.
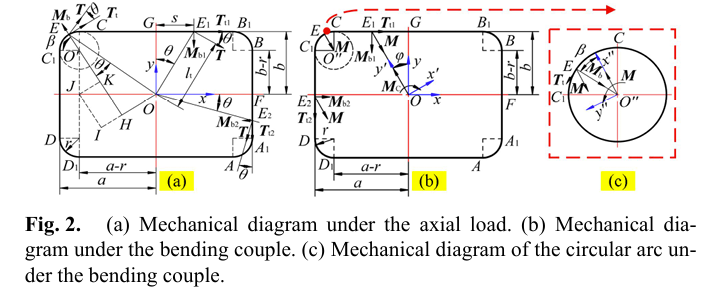
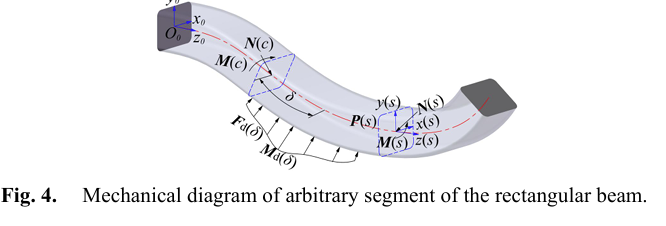
Некруглая пружина эквивалентна упругому брусу с анизотропной изгибной жесткостью, полученной с использованием принципа проекции деформации микросегментов.
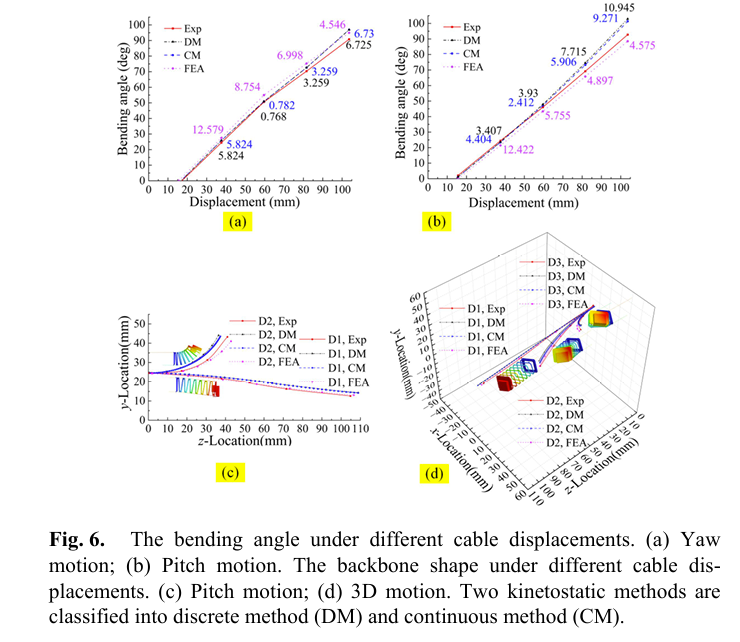
Разработаны две кинетостатические модели: дискретная модель конечных сегментов (DM) для эффективных вычислений и непрерывная модель на основе теории стержней Коссера (CM) для более высокой точности прогнозирования формы.
Предложенные методы проверены с помощью конечно-элементного анализа (FEA) и физических экспериментов.
Для описания деформации выдвижного призматического пружинного каркаса под действием сил кабелей, силы тяжести и внешних нагрузок каркас эквивалентен упругому брусу с анизотропной изгибной жесткостью.
Разработаны два дополнительных подхода к моделированию:
Каркас дискретизирован шаг за шагом
Сжатие и изгиб разделены через линейную суперпозицию
Аналитические выражения для изгиба и вращения
Подходит для быстрых вычислений и приложений управления
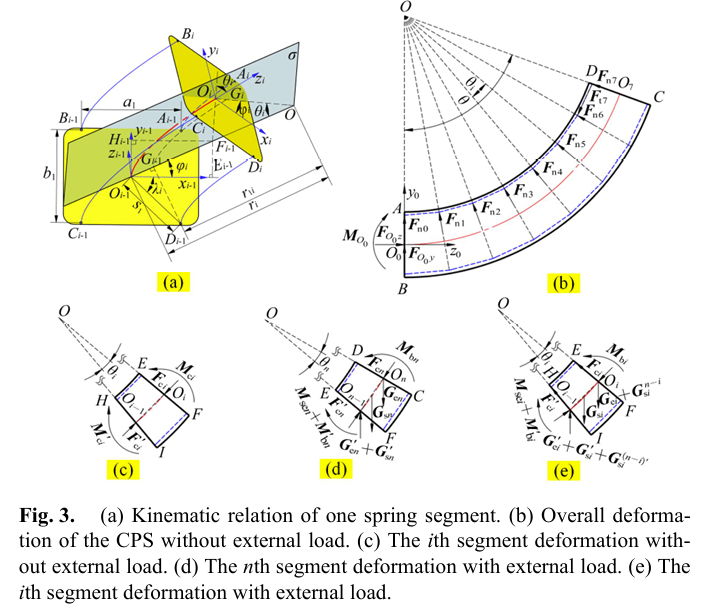
Основана на эквивалентном прямоугольном брусе
Использует теорию стержней Коссера
Решается с постепенно расширяющейся областью интегрирования
Обеспечивает более высокую точность прогнозирования формы в ограниченных пространствах
Точность модели проверена с помощью конечно-элементного моделирования и физических экспериментов.
Пружинный каркас смоделирован как 3D элементы сплошной среды
Приводные кабели смоделированы как элементы только с растяжением
Симуляции проведены для изменения шага, рыскания и комбинированной 3D деформации
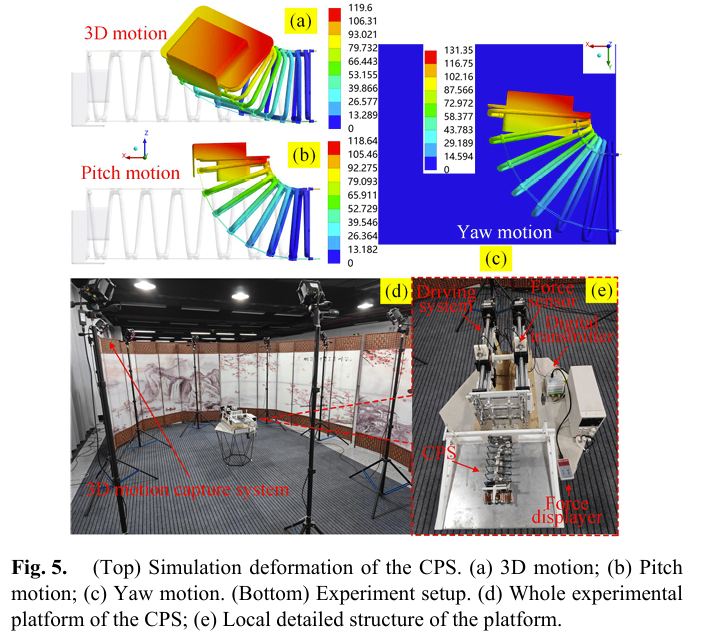
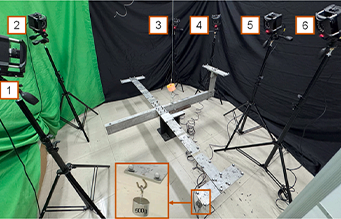
Физическая экспериментальная платформа включает:
Кабельно-приводную систему приведения в действие
Датчики силы
Система захвата движения NOKOV 3D
Отражающие маркеры размещены вдоль пружинного каркаса для захвата трехмерных координат в реальном времени. Это позволяет восстановить форму центральной линии каркаса и углы положения при различных условиях приведения в действие.
Как дискретные, так и непрерывные модели демонстрируют хорошее согласование с экспериментальными измерениями.
Тип модели | Точность | Вычислительная стоимость | Типичный случай использования |
Дискретная модель (DM) | Хорошая | Низкая | Реальное управление, открытые среды |
Непрерывная модель (CM) | Выше | Умеренная | Ограниченные пространства, точное прогнозирование формы |
Модель МКЭ | Эталонная | Высокая | Структурный анализ и оптимизация |
Измеренные данные деформации каркаса, полученные с помощью системы захвата движения NOKOV, служат экспериментальным эталоном для количественного сравнения.
Робот протестирован в сценариях, связанных с ядерным осмотром, включая:
Перемещение по прерывистым поверхностям
Переход между трубопроводами и сосудами под давлением
Движение вдоль сложных геометрий оборудования
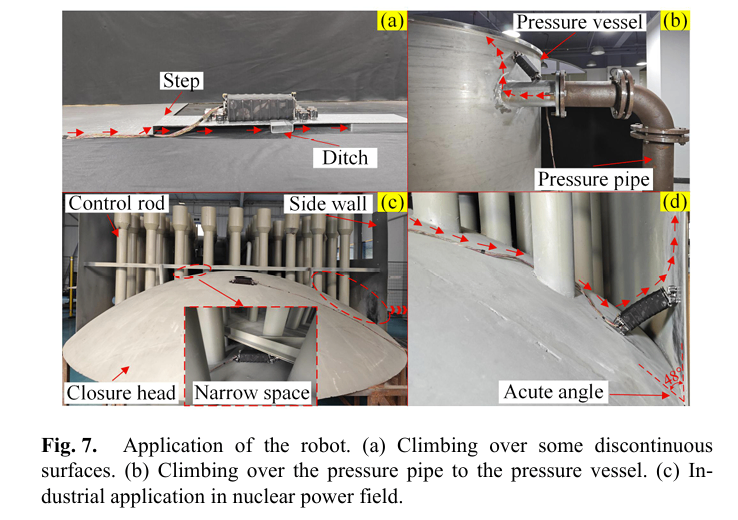
Эти демонстрации подтверждают способность робота поддерживать стабильное движение и адаптивность в средах, характерных для задач осмотра ядерных объектов.
Система захвата движения NOKOV 3D предоставляет:
Высокоточные 3D данные о положении каркаса
Точное восстановление непрерывной деформации