Исследовательская группа под руководством профессора Сюй Юньдоу из Яньшаньского университета разработала гексаподного робота для переноски грузов на основе механизма Чебышева. Конструкция его ног и многоприводная система были оптимизированы для достижения высокой жесткости, легкого веса, грузоподъемности в 20 кг и адаптивности к различным типам местности, предоставляя новое решение для работы в сложных условиях. Соответствующая научная статья «Разработка грузонесущего гексаподного робота с адаптацией к местности и ногами на основе механизма Чебышева» была опубликована в Journal of Field Robotics, CAS Q2 журнал в области робототехники.
Система захвата движения NOKOV предоставила данные о положении для проверки различий между смоделированными и фактическими движениями робота. Данные показали, что теоретические и фактические значения в основном совпадают, подтверждая правильность теоретического анализа.
Цитирование
Ju, Z., Wu, R., Guo, D. and Xu, Y. (2025), Development of a Load-Bearing, Terrain-Adaptive Hexapod Robot With Chebyshev-Linkage Legs. Journal of Field Robotics. <https://doi.org/10.1002/rob.22463>
Фон
Традиционные колесные роботы сталкиваются с трудностями при динамической настройке и стабильном движении по сложной и неизвестной местности. Вдохновленные движением животных, исследователи разработали шагающих роботов для лучшего преодоления таких территорий. Однако чрезмерное количество активных соединений в ногах может увеличить частоту отказов и уменьшить грузоподъемность. Поэтому оптимизация числа активных соединений и повышение грузоподъемности стали ключевыми направлениями исследований. В этом контексте данное исследование рассматривает грузоподъемность шестиногого робота и оптимизацию привода на основе механизма Чебышева.
Вклад
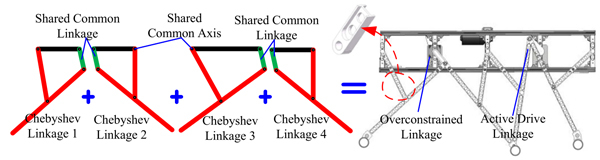
В данной работе предложена новая конструкция ног — HexaBeast. Этот дизайн интегрирует сверхограниченную архитектуру ног на основе механизма Чебышева, принципы высокой жесткости и низкого трения, а также многоприводную систему для улучшения адаптации робота к различным типам местности, включая снег, песок, лужи, лед и пустыню.
Конструкция системы
Общий дизайн платформы: Гексаподный робот использует структуру механизма Чебышева, приводимую шаговыми двигателями, и включает сервоприводы и линейный двигатель в корпусе для обеспечения бокового перемещения и скручивания туловища.
Инновационная конструкция ног: Нога состоит из четырех последовательно соединенных механизмов Чебышева, образуя сверхограниченную (статически неопределенную) структуру. Это снижает количество активных соединений, избегает сложных передач и усиливает несущую способность.
Особый дизайн рамы: Была разработана многоприводная совместная рама для бокового перемещения робота. Когда боковое движение не задействовано, туловище может скручиваться для адаптации к местности.
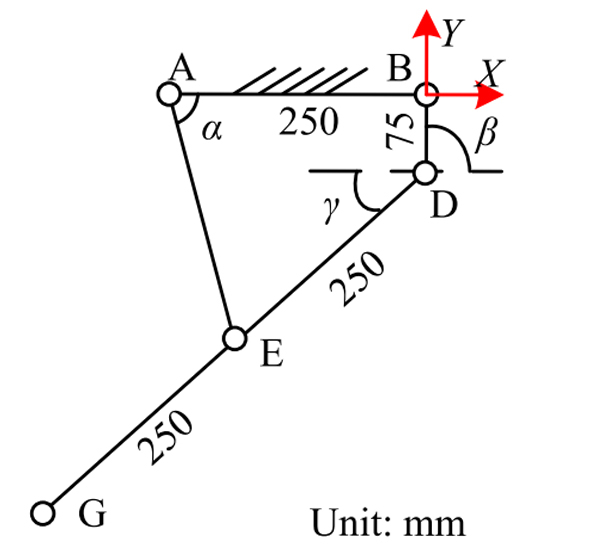
Структура ног робота HexaBeast
Анализ характеристик
Анализ параметров длины механизма Чебышева: При длине звена AE 250 мм обеспечивается определенная способность преодолевать препятствия при минимальных колебаниях корпуса.
Статический механический анализ ноги: По сравнению с несверхограниченными структурами, сверхограниченная структура демонстрирует более высокую жесткость, меньшую деформацию и лучшее распределение сил, что приводит к меньшим силам на конечной точке ноги под определенными углами.
Сравнение условий нагрузки на звенья ноги во время движения: Сверхограниченная структура также улучшает распределение сил внутри ноги во время движения робота.
Анализ показывает, что оптимизация длин механизма Чебышева и использование сверхограниченной структуры ног могут повысить производительность робота и его грузоподъемность.
Параметры длины механизма Чебышева.
Полевые эксперименты
Эксперимент по верификации движения: Система захвата движения NOKOV использовалась для сбора данных о движении робота для проверки различий между смоделированным и фактическим движением. Двенадцать камер захвата отслеживали шесть случайно выбранных точек (KR, MR, HR, BR, BL, ML). Результаты показали, что смоделированное и фактическое движение в основном совпадают, что подтвердило теоретический анализ.
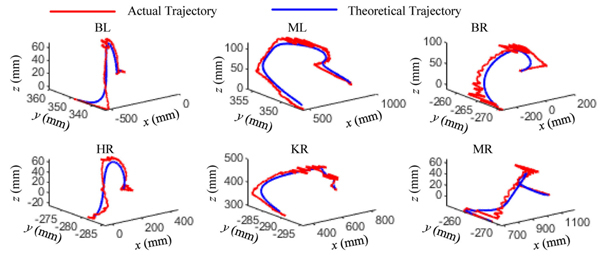
Сравнительная кривая между теоретическими значениями (синие) и фактическими значениями (красные).
Эксперименты по адаптации к окружающей среде и другим характеристикам: Эксперименты продемонстрировали хорошую ходовую производительность на льду, снегу, грязи и песке. Робот успешно преодолел склон с углом 10.77°. В имитационных тестах застревания ног он успешно освободился и прошел испытание на каменистом русле реки. В экспериментах по повороту две походки работали стабильно. В экспериментах по боковому движению он нормально перемещался под нагрузкой 5 кг. Тесты грузоподъемности определили максимальную нагрузку в 20 кг.
Эксперименты по адаптации к окружающей среде и другие характеристики
Система захвата движения NOKOV предоставила важные данные о положении для данного исследования, помогая проверить различия между смоделированными и фактическими движениями робота и подтвердить правильность теоретического анализа.
Профили авторов
ЦЗЮй Чжунцзинь (со-первый автор), аспирант кафедры мехатроники, факультет машиностроения, Яньшаньский университет. Научные интересы: реконфигурируемые структуры шагающих роботов, управление устойчивостью шагающих роботов.
У Руи (со-первый автор), магистр, выпускник факультета машиностроения, Яньшаньский университет. Текущая должность: проектирование сверхпроводящих магнитов в Western Superconducting. Исследовательские интересы: конфигурация многоногих роботов.
ГУО Дамэн, магистрант кафедры мехатроники, факультет машиностроения, Яньшаньский университет. Исследовательский интерес: многоногие роботы для лазания по стенам.
СЮЙ Юньдоу (ответственный автор), профессор, научный руководитель докторантов, заведующий кафедрой, факультет машиностроения, Яньшаньский университет. Научные интересы: специальные роботы, развертываемые механизмы, параллельно-последовательные гибридные механизмы.