Обзор платформы
Экспериментальная платформа Crazyswarm для многопользовательского формирования роя беспилотников (UAV) разработана на основе ROS (Robot Operating System) и позволяет быстро проводить эксперименты с различными задачами одиночного полета беспилотника и разработкой и валидацией алгоритмов управления роем (с использованием дронов Crazyflie). Эта платформа предоставляет полный набор программных и аппаратных средств для разработки, отладки и валидации полетов системы управления роем UAV. Пользователи могут оптимизировать и валидировать алгоритмы без глубоких знаний программирования, что делает ее подходящей для обучения и вторичной разработки.
Функции платформы
Разработка и верификация алгоритма управления полетом БПЛА;
Разработка и валидация алгоритмов управления роями дронов
Эксперименты с много-роботными формированиями
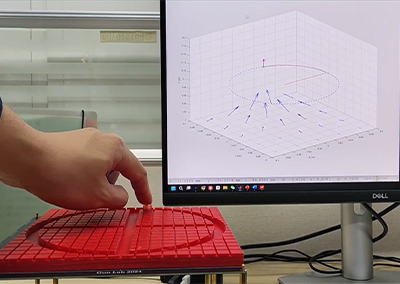
Эксперимент по многагентному кооперативному формированию
Конфигурация платформы
| Имя устройства | Эффекты отображения Случай Контакт
Мы стремимся реагировать оперативно и свяжемся с вами через наших местных дистрибьюторов для дальнейшей помощи.
ИнженерияВиртуальная реальностьНауки о движенииРазвлечения
Я хотел бы получить предложение
Пекин NOKOV Science & Technology Co., Ltd (штаб-квартира)
Объем захвата*
Цель*
Полные телаДроны/РоботыДругие
Количество
Тип камеры
Pluto1.3CMars1.3HMars2HMars4HПодводныйДругие/Я не знаю
Количество камер
46812162024Другие/Я не знаю
|