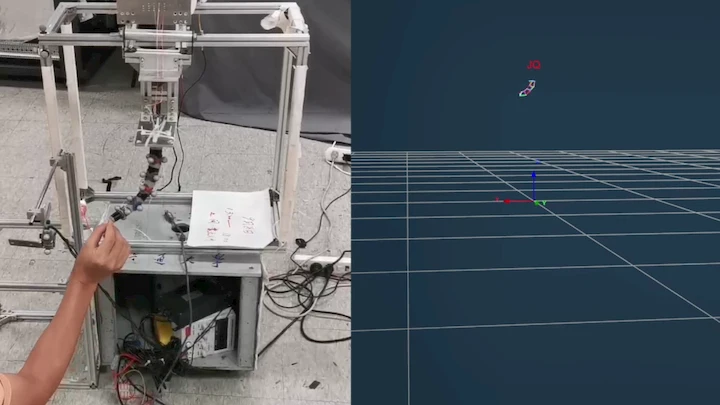
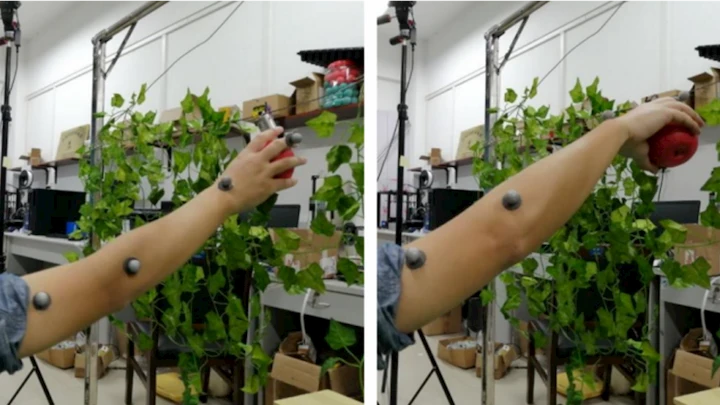
Применения в
Роботизированных руках
Роботизированная рука, Концевые эффекторы, Манипуляция, Телеоперация,
Взаимодействие/Сотрудничество человек-робот, Избежание препятствий/столкновений,
Управление, Локализация, Навигация, Восприятие, Планирование пути,
Планирование траектории, Визия, Мягкий робот, Медицинский робот,
Агроробот, Мобильный робот, Человеческое тело