
Недавно команда под руководством профессора Вэй Дуна из Шанхайского университета Цзяо Тонг в сотрудничестве с профессором Синсинем Цзоу из Университета Искусственного Интеллекта имени Мохаммеда бин Зайда (MBZUAI) опубликовала статью под названием “Flying Co-Stereo: Enabling Long-Range Aerial Dense Mapping via Collaborative Stereo Vision of Dynamic-Baseline” в журнале IEEE Transactions on Robotics. Эта работа представляет систему стереозрения для летательных аппаратов где два БПЛА образуют конфигурацию с широкой базой для обеспечения плотного трехмерного картографирования на большие расстояния. Предложенная система достигает плотной реконструкции на расстояниях до 70 метров с относительной ошибкой от 2.3% до 9.7%.
Система захвата движения NOKOV предоставляет высокоточные данные о положении для проверки предложенного алгоритма оценки относительного положения.
Фон
Для беспилотных летательных аппаратов работающих в крупномасштабных неизвестных средах восприятие на большие расстояния является важным для безопасной навигации. По сравнению с системами LiDAR стереокамеры имеют преимущества в плане стоимости и легкого веса. Однако традиционные стереокамеры ограничены короткими фиксированными базами которые обычно ограничивают их зону восприятия до 20 метров. Существующие системы с широкой базой часто слишком велики чтобы их можно было разместить на малых платформах БПЛА. В то же время распределение стереокамер по двум динамически летящим БПЛА добавляет дополнительные сложности включая динамически изменяющиеся базы и трудности ассоциации признаков между различными видами.
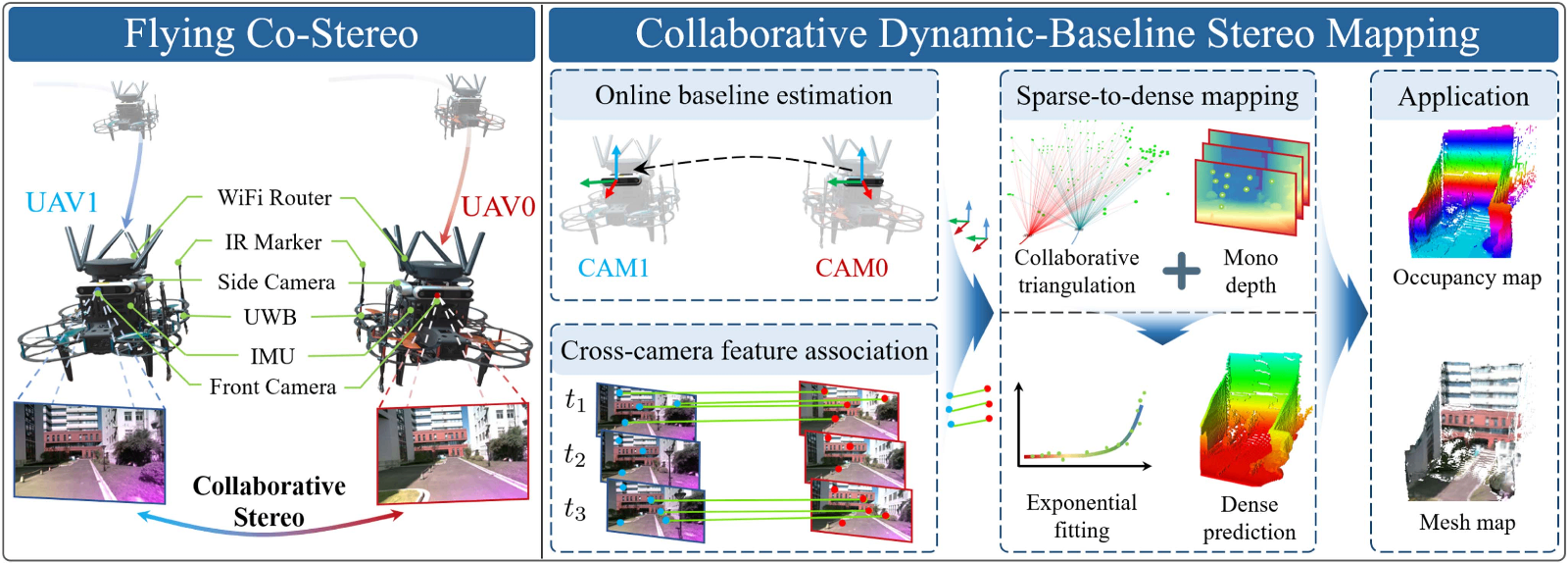
Архитектура системы Flying Co-Stereo в рамках нашей предложенной модели CDBSM
Вклады
1) Предложена система Flying Co-Stereo в которой два совместных БПЛА формируют широко-базовую кросс-агентную стереосистему зрения в единой рамке CDBSM что позволяет проводить плотное картографирование на большие расстояния в крупномасштабных неизвестных средах.
2) Разработана DS-VIRE для достижения надежной и точной онлайн оценки динамической меж-БПЛА базы в сложных условиях на открытом воздухе.
3) Разработана гибридная стратегия ассоциации визуальных признаков сочетающая кросс-агентное глубокое сопоставление с внутренним агентным отслеживанием признаков для обеспечения реального времени и постоянства соответствий признаков при меняющихся ракурсах.
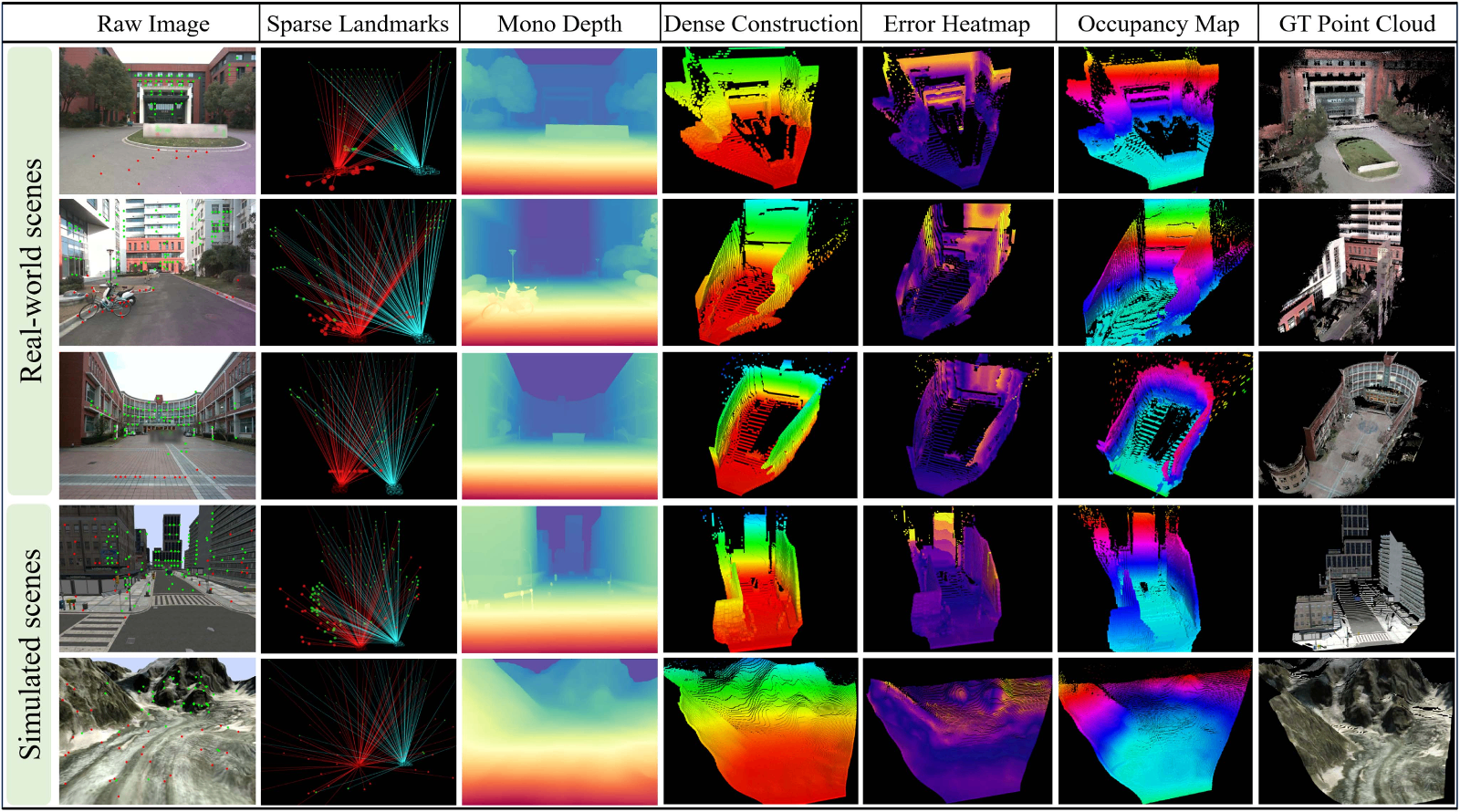
4) Предложена схема восстановления глубины от разреженной к плотной которая уточняет плотные монохромные прогнозы глубины используя экспоненциальную аппроксимацию разреженных ориентиров полученных триангуляцией на большие расстояния для точного масштабного картографирования.
Экспериментальная Проверка
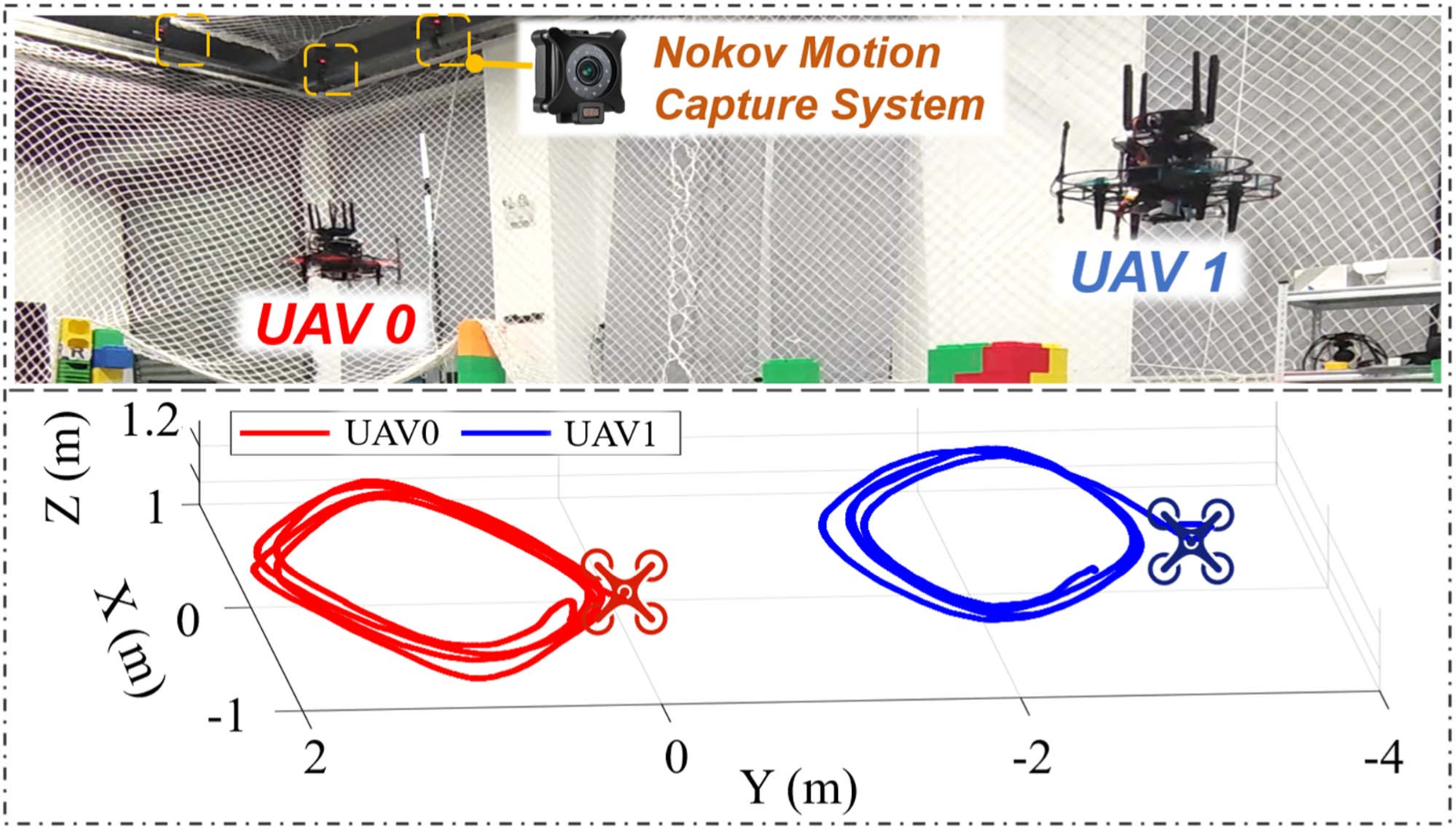
Эксперименты по оценке относительного положения Flying Co-Stereo под системой захвата движения NOKOV
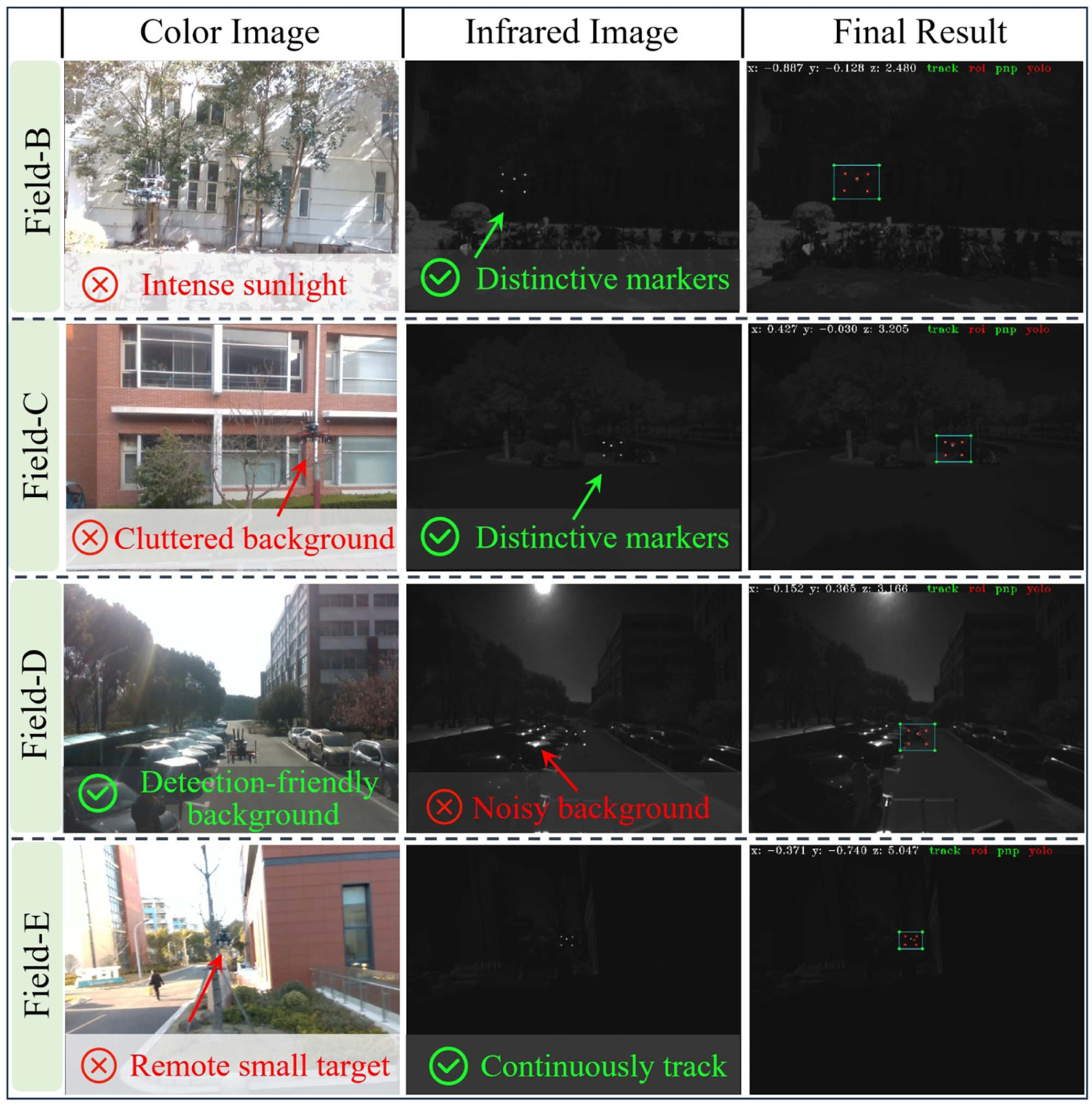
Эксперименты DS-MVDT с проблемами от яркого солнца загроможденного фона световых шумов и удаленного наблюдения.
Ответственные авторы
Вэй Дун
Постоянный доцент Школы Механической Инженерии Шанхайского университета Цзяо Тонг. Его исследования сосредоточены на многороботной коллаборации и активном восприятии.
Синсинь Цзоу
Постоянный ассистент-профессор в отделе робототехники Университета Искусственного Интеллекта имени Мохаммеда бин Зайда. Его научные интересы включают робототехнику пространственный интеллект оценку состояния и воплощенный интеллект.
На предстоящей ICRA 2026 Профессор Синсинь Цзоу вместе с международными учеными организует семинар под названием “MM-SpatialAI: Multi-Modal Spatial AI for Robust Navigation and Open-World Understanding.”
NOKOV Motion Capture является спонсором этого семинара. Приглашаются исследователи из смежных областей принять участие и внести вклад в развитие многомодального пространственного интеллекта для надежной навигации и понимания открытого мира.
Страница семинара находится по адресу https://xingxingzuo.github.io/MM-SpatialAI/.




