
Исследовательская группа под руководством профессора Люй Симина из Университета Сунь Ят-сена недавно опубликовала свою статью «Планирование интегрированного движения всего тела для воздушных манипуляторов» в престижном журнале IEEE Transactions on Robotics (T-RO).
В статье предлагается интегрированный подход к планированию движения всего тела для воздушных манипуляторов. Этот подход включает три ключевых новшества:
(1) Динамическая подгонка объема столкновений: полностью учитывает изменения объема столкновений, вызванные изменением конфигурации манипулятора во время реальной работы, эффективно решая потенциальные проблемы безопасности, возникающие из-за этих изменений;
(2) Гибкая система ограничений путевых точек: использует различные типы гибких ограничений путевых точек, которые могут гибко комбинироваться для формирования различных операционных подзадач;
(3) Оптимизация с использованием обучения через подражание: при развертывании исследователи обнаружили, что существующие алгоритмы часто не удовлетворяют требованиям задач для агрессивных маневров (например, угол крена > 45°), так как они часто сходятся к плохим субоптимальным решениям. Через глубокий анализ успешных траекторий агрессивных маневров они выяснили, что БПЛА демонстрируют определенные тенденции полета при выполнении таких маневров (как показано на рисунке 1(b) ниже). На основе этого понимания они инновационно ввели предварительное обучение через подражание для направления оптимизации, в итоге достигнув превосходных траекторий исполнения.
Кроме того, эта работа всесторонне проверила эффективность и практичность фреймворка посредством комплексных исследований абляции, а также симуляций и реальных экспериментов.
Ссылка на статью:https://arxiv.org/abs/2501.06493
Страница проекта:https://github.com/SYSU-HILAB/am-planner
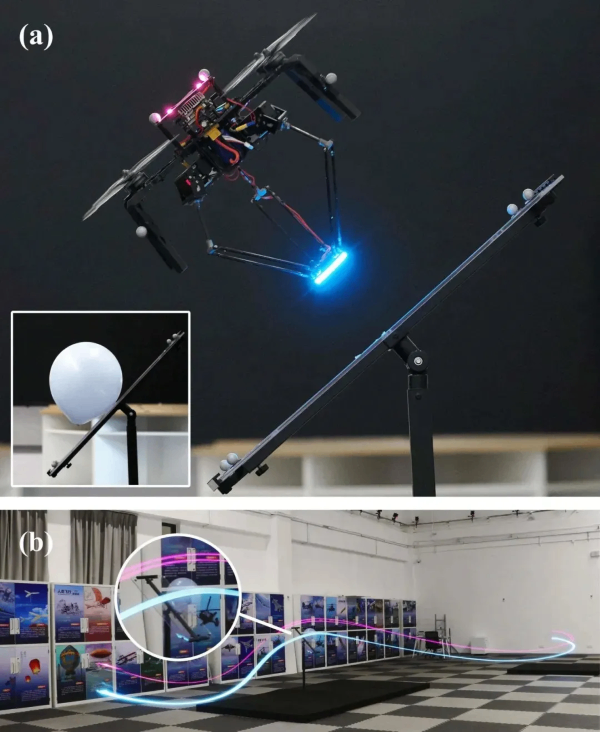
Рисунок 1: Демонстрация ударной операции с использованием интегрированного планирования движения всего тела. (a) Воздушный манипулятор выполняет запланированную траекторию для достижения ограниченной путевой точки, сохраняя ориентацию параллельно наклонной плоскости, настраивая дельта-руку для удара по шарику. (b) Визуализация в режиме времени, захватывающая полное выполнение запланированного движения.
Научный контекст
Воздушные манипуляторы объединяют быстрое перемещение БПЛА со способностями ловкой манипуляции роботизированных рук, позволяя выполнять разнообразные задачи в трехмерном пространстве. Однако большинство существующих алгоритмов и оборудования для воздушных манипуляторов являются специализированными, обычно ограниченными предопределенными одиночными задачами, такими как захват или написание текста. Для манипуляторов существует сильная потребность в поддержке разнообразных операционных задач. Как охарактеризовать планирование таких разнообразных задач в рамках единого подхода стало ключевым вызовом в этой области.
Стратегия активного создания коридоров полета
Для поддержки реализации данного фреймворка и обеспечения достаточного пространства решений вокруг всех ограничений путевых точек данное исследование впервые представляет усиленную стратегию создания коридоров полета. Создавая набор правил генерации, она активно создает два многогранника около каждой ограниченной путевой точки, которые затем соединяются со всеми другими многогранниками через стандартное построение коридора полета. Рисунок 2 иллюстрирует метод активного создания коридоров полета, а Рисунок 3 представляет исследование абляции по созданию коридоров полета, демонстрирующее, что предложенный метод гарантирует достаточное пространство решений около ограничений путевых точек, плотно прилегая к наклонной поверхности.
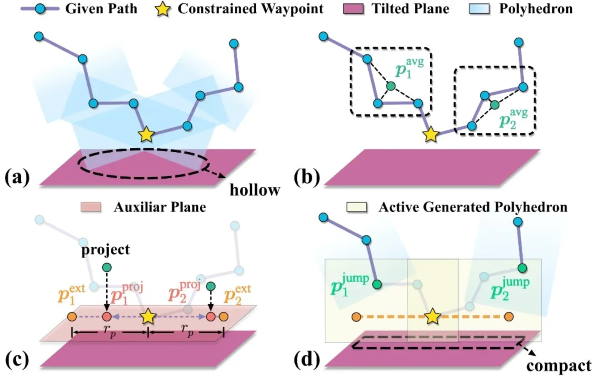
Рисунок 2: Метод активного создания коридоров полета.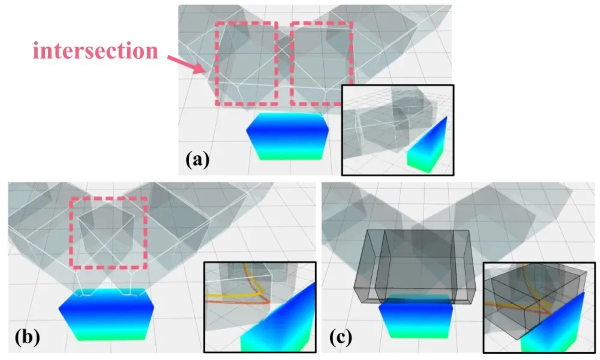
Рисунок 3: Исследование абляции по созданию коридоров полета. Результаты демонстрируют, что предложенный метод обеспечивает достаточное пространство решений около ограничений путевых точек, плотно прилегая к наклонной поверхности.
Динамическая подгонка объема столкновений
Независимо от конкретной задачи, эта работа должна также гарантировать, что воздушный манипулятор обладает базовыми возможностями полета, генерируя траектории, которые являются плавными, эффективными и удовлетворяют ограничениям динамической и кинематической осуществимости, а также ограничениям безопасности. Наиболее выдающейся особенностью данной работы является оптимизация ограничений безопасности. Учитывая, что манипулятор находится в постоянном движении во время реальной работы, объем столкновений всей системы воздушного манипулятора непрерывно меняется. Традиционное планирование обхода препятствий для БПЛА использует статические эллипсоиды или сферы для аппроксимации объема столкновений для последующей оптимизации; однако эти методы нельзя применять напрямую к воздушным манипуляторам. Чрезмерно агрессивные аппроксимации приводят к проблемам безопасности, тогда как слишком консервативные снижают операционные возможности БПЛА.
Эта работа инновационно предлагает подход переменной подгонки эллипсоидов, который регулирует размер эллипсоида вдоль оси z на основе длины расширения манипулятора. Это позволяет воздушному манипулятору втягивать руку при необходимости и выдвигать ее во время выполнения задачи, как показано на Рисунке 4 ниже.

Рисунок 4: Аппроксимация объема столкновений с использованием переменного эллипсоида для воздушного манипулятора.
Гибкая система ограничений путевых точек
Для соответствия различным требованиям задач эта работа инновационно предлагает три типа ограничений путевых точек для воздушных манипуляторов:
Ограничение точки: Требует, чтобы либо квадрокоптер, либо конечный эффектор прошел через определенную точку в мировой системе координат. Примеры включают вертикальный контакт конечного эффектора с объектом во время захвата, проникновение конечного эффектора в шарик во время удара или прохождение квадрокоптера через центральную точку ворот.
Ограничение по оси: Ограничивает конечный эффектор линейным движением вдоль определенной оси, например, толкая объект вперед вдоль оси x.
Ограничение по плоскости: Требует, чтобы конечный эффектор оставался в пределах назначенной плоскости, например, перетаскивая объект по поверхности стола или письма на плоской поверхности.
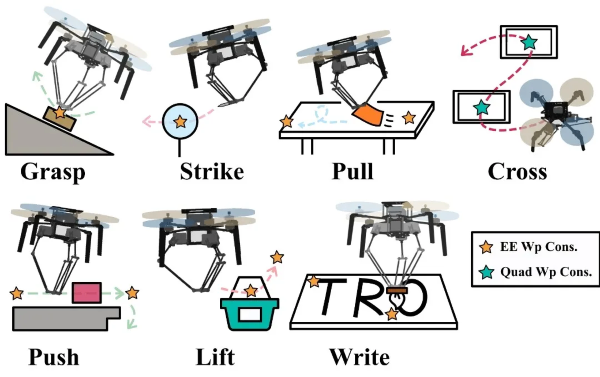
Рисунок 5: Разделение различных подзадач через ограничения путевых точек.
Оптимизация с использованием обучения через подражание
При полете в ограниченных условиях для агрессивных маневров, если начальное решение плохое, это может привести к окончательному локальному оптимуму, который не соответствует необходимым условиям. Как показано на Рисунке 6(a), оранжевая траектория роботизированной руки полностью промахивается мимо целевой точки (красная точка). Однако, анализируя эти успешные траектории агрессивных маневров, эта работа обнаружила, что БПЛА склонны следовать «дуговым» траекториям для удовлетворения динамических ограничений. Таким образом, собирая большое количество эффективных траекторий, можно использовать обучение через подражание для аппроксимации тенденций этих локальных траекторий. Но как можно эффективно использовать эти тенденции?
Основываясь на вышеупомянутом методе обработки ограничений путевых точек, эта работа берет несколько направляющих точек из этих локальных траекторий для принуждения траектории проходить через них. Однако чрезмерно строгие ограничения направляющих точек могут все еще привести к плохим траекториям или даже к отказу. Чтобы решить эту проблему, работа инновационно предлагает применять ограничения направляющих точек на начальной стадии оптимизации разогрева и удалять их после того, как траектория примерно оформится, чтобы получить лучшие траектории. Проведены комплексные исследования абляции по сравнению полиномиального обучения с дискретным обучением точек, количеству направляющих точек и необходимости второй стадии оптимизации. Итоговые результаты, показанные на Рисунках 6(b-f) и 7, демонстрируют, что двухэтапная оптимизация с использованием полиномиального обучения с двумя направляющими точками достигает наилучшей производительности.
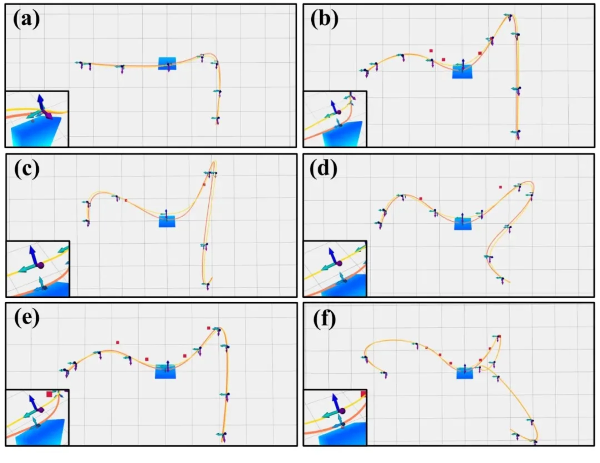
Рисунок 6: Исследование абляции по управляемой оптимизации, сравнивающее два метода обучения (полиномиальные траектории и дискретные точки) с различным числом направляющих точек.
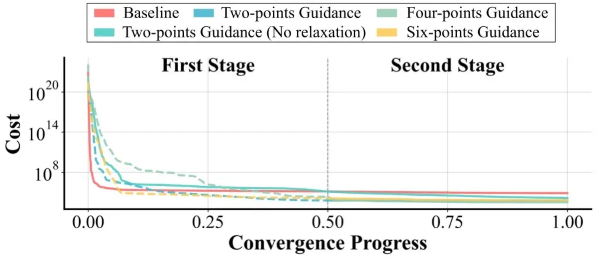
Рисунок 7: Сравнение кривых сходимости различных методов оптимизации в случайно выбранных сценариях.
Проверка моделированием
Для проверки эффективности фреймворка эта работа протестировала производительность трех различных конфигураций манипуляторов в задачах захвата с помощью симуляций:
Телескопический манипулятор: движение ограничено только по оси z
Манипулятор с одной степенью свободы: способен двигаться по круговой дуге
Манипулятор с двумя степенями свободы: обеспечивает плоскостное движение в пределах одной плоскости
Как показано на Рисунке 8, положения конечных эффекторов остаются эффективно ограниченными в своих рабочих пространствах, и все конфигурации успешно выполняют задачу.
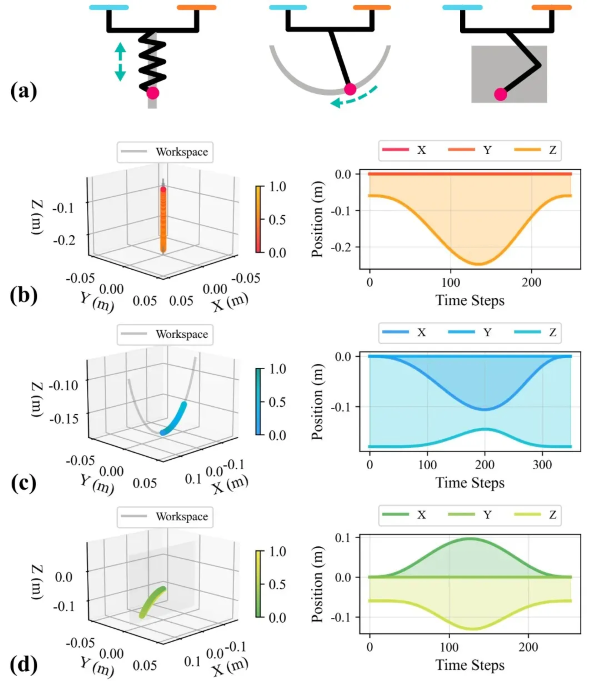
Рисунок 8: Движение конечных эффекторов воздушных манипуляторов с различными конфигурациями в задачах захвата.
Реализация в реальном мире
Эта работа оценила девять основных навыков манипуляции: удар, захват, толчок, тяга, подъем, нажатие, намотка, пересечение и письмо. Среди них как удар, так и захват выполнялись при больших ограничениях на ориентацию и дополнительно использовали оптимизацию с обучением через подражание.
<span style="letter-spacing: 0px; font-family: Inter, "Noto Sans SC", sans-serif



