
Команда профессора Вэйвэя Вана из Университета Осаки разработала новый подход к планированию бимануальной перехватки и управлению адмиттансом для роботов. Последовательно выбирая положения захвата и ориентацию объекта с помощью двух роботизированных рук и выполняя три ортогональных действия захвата предложенный подход активно снижает неопределенности в ориентации объекта. Их исследование под названием «Бимануальное планирование перехватки и управление для активного снижения неопределенности позы объекта» было опубликовано в журнале IEEE Robotics and Automation Letters.
Высокоточные данные о положении захваченных объектов полученные в реальном времени системой захвата движения NOKOV сравнивались с оценками положений полученными предложенным методом с использованием трех последовательных захватов. Это сравнение подтвердило эффективность метода в снижении неопределенности положения.
Цитирование
Нагахама Рюта Вэйвэй Ван Чжэнтао Ху Кенсукэ Харада «Бимануальное планирование перехватки и управление для активного снижения неопределенности позы объекта» предварительная публикация arXiv arXiv:2503.22240 (2025).
Предыстория
В области манипуляции роботов точный захват остается сложной задачей из-за неопределенностей в позе объекта. Традиционные решения обычно делятся на две категории: методы коррекции на основе датчиков и методы ограничения на основе приспособлений. Хотя они и эффективны оба подхода имеют ограничения — методы на основе датчиков требуют сложной калибровки и техники слияния данных от датчиков а методы на основе приспособлений требуют индивидуальных приспособлений под геометрию объектов что снижает гибкость системы.
Вклад
Это исследование предлагает метод бимануального планирования перехватки и управления который выполняет три последовательных захвата без использования внешних приспособлений или дополнительных датчиков. Используя параллельные захваты с плоскими накладками на пальцы и управляя адмиттансом метод эффективно снижает неопределенность позы объекта значительно усиливая гибкость и адаптивность операций роботизированного захвата.
Методология
1. Планирование перехватки с использованием ортогональных троек
Команда сначала использует антиподалистическое планирование захвата для создания кандидатных поз захвата. Эти позиции затем группируются согласно направлениям открытия/закрытия захвата гарантируя что выбранные захваты взаимно ортогональны. Три ортогональных захвата коллективно ограничивают положение и ориентацию объекта снижая неопределенность до уникального состояния.
2. Адаптация к неопределенности позы объекта
Разработана стратегия управления адмиттансом позволяющая роботизированной системе адаптировать свою позу захвата на основе обратной связи по силе в режиме реального времени. Датчики силы/момента расположенные на запястьях робота фиксируют контактные силы во время захвата позволяя роботу динамически корректировать свое движение. Это предотвращает чрезмерное приложение силы снижая риск деформации или повреждения объекта.
Эксперименты в реальных условиях
Эксперименты проводились с двумя типами L-образных объектов — один с квадратным поперечным сечением другой с ромбическим поперечным сечением. Объекты были случайным образом размещены и двухруковый робот выполнил три последовательных действия захвата:
lПервый захват: Устанавливает начальное положение и ориентацию объекта.
lВторой захват: Снижает одну степень свободы неопределенности. Управление адмиттансом динамически корректирует позу захвата чтобы соответствовать фактической конфигурации объекта.
lТретий захват: Разрешает оставшиеся степени свободы перемещая объект в целевую позу с обеспечением стабильного захвата продолжительным управлением адмиттансом.
Система захвата движения NOKOV использовалась для получения эталонных высокоточных данных о позе объекта для сравнения с оценками полученными предложенным методом.
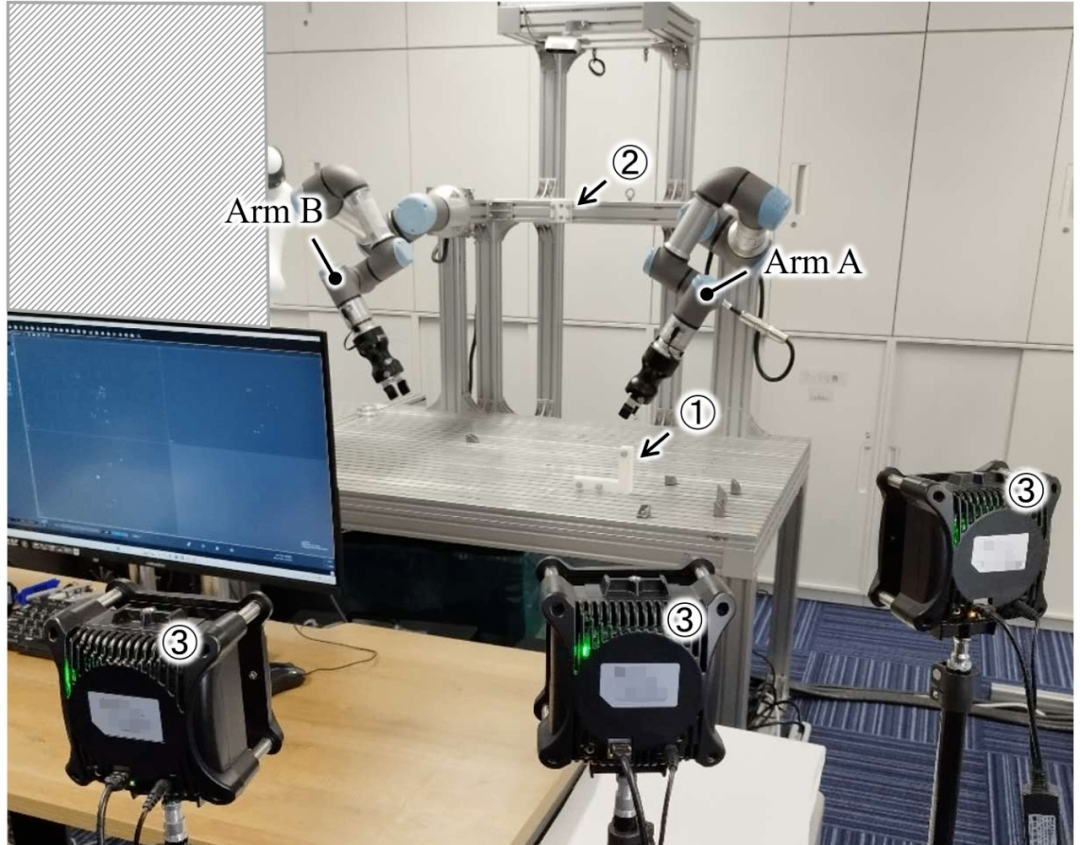
Экспериментальная платформа ① Целевой объект с оптическими маркерами ②Опорные маркеры для глобального позиционирования ③ Система захвата движения NOKOV для обнаружения маркеров
Хотя абсолютные ошибки в положении и ориентации были относительно большими отклонения находились в том же порядке величины что и те которые наблюдались с использованием системы захвата движения NOKOV. Предложенный метод показал сильную повторяемость и надежную производительность относительного вывода в снижении неопределенности позы.
В повторных испытаниях с использованием трех последовательных действий захвата отклонения позы объекта от истинных данных системы NOKOV постоянно составляли менее 05 мм что подтверждает эффективность метода в снижении неопределенности.
Ответственный автор
Вэйвэй Ван является штатным доцентом Высшей школы инженерной науки Университета Осаки и исследователем Центра исследований симбиотических интеллектуальных систем. Он также является приглашенным исследователем в RIKEN (BIKEN) Япония. Он возглавляет разработку открытой системы WRS для роботизированного планирования и управления и опубликовал более 200 статей. Он владеет шестью японскими патентами на изобретения и является заместителем редактора ведущих журналов таких как TRO IJRR и RAL. Он также работал организатором или соорганизатором крупных международных конференций по робототехнике включая IEEE ICRA IROS ROBIO ARM и ICCRE.



