
Исследовательская группа из Пекинского университета авиации и космонавтики предложилаалгоритм онлайн-планирования траектории и размера формации на основе оптимизации. Соответствующая исследовательская статья под названием Временное планирование формации и распределённое управление для нескольких БПЛА в загромождённой среде была опубликована в журнале IEEE Transactions on Industrial Electronics.
Система захвата движения NOKOV предоставляет данные о позиционировании и восприятии окружающих препятствий для лидера БПЛА путём фиксации положения отражающих маркеров на БПЛА что позволяет осуществлять онлайн-планирование траектории и контроль формации.
Формат цитирования
Ze К Wang В Liu K и Lü J (2023) Временное планирование формации и распределённое управление для нескольких БПЛА в загромождённой среде IEEE Transactions on Industrial Electronics https://doi.org/10.1109/TIE.2023.3335448
Исследовательский контекст
Традиционные методы управления формированием многоуровневых БПЛА в основном используют централизованные архитектуры где лидер БПЛА получает глобальную информацию перед тем как передать опорные сигналы каждому последующему БПЛА Этот подход требует значительных коммуникационных ресурсов и обладает слабой устойчивостью системы В отличие от этого распределённое управление формированием стало исследовательским фокусом в последние годы Текущие исследования по управлению формацией многоуровневых БПЛА в сложных загромождённых средах остаются ограниченными что препятствует широкому применению Для преодоления этих технических ограничений исследовательская команда Университета Бэйхан разработала метод управления формированием БПЛА основанный на онлайн-планировании.
Основные достижения
1 Предложен новый алгоритм онлайн-планирования траектории центра формации и её размера одновременно повышая плавность траектории и безопасность управления формацией
2 На основе полной нелинейной динамической модели БПЛА разработан метод распределённого управления формацией который решает задачи реального времени по избежанию препятствий в сложных условиях при этом снижая нагрузку на связь и повышая практическую применимость
3 Введён гладкий распределённый наблюдатель эталонного сигнала исключающий использование функций знака присутствующих в существующих наблюдателях и смягчающий нестабильность управления вызванную дребезгом наблюдателя
Экспериментальная процедура
Эксперименты проводились в помещении где система захвата движения NOKOV обеспечивала позиционирование БПЛА Планирование и управление лидером БПЛА моделировались через компьютерные потоки в то время как распределённые узлы наблюдения и узлы управления последующими БПЛА работали на верхнем компьютере Распределённая сеть связи моделировалась с использованием ROS а связь между верхним компьютером и БПЛА осуществлялась через Crazyradio.
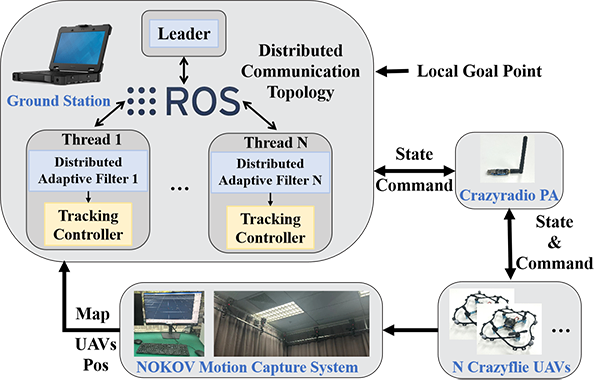
Схема экспериментальной системы
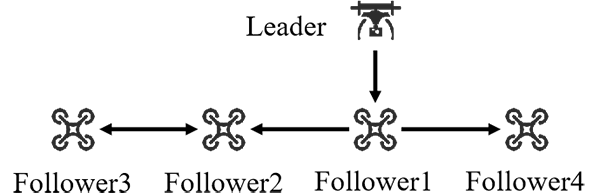
Топология связи
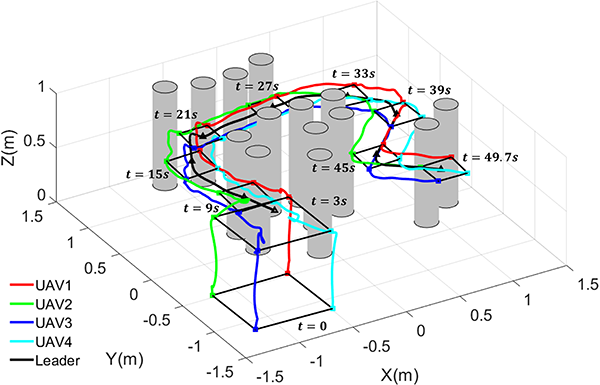
Траектория последующих БПЛА в реальном мире
Тестовая среда (3×3×3 м³) содержала несколько препятствий с локальными и глобальными целевыми точками.
Результаты продемонстрировали успешное избегание препятствий сохраняя при этом полигональные формации с ошибками отслеживания формации сходящимися около нуля Стабильные управляющие входы (тяга и крутящий момент) подтвердили плавность и производительность планирования траектории в реальном времени вместе с эффективностью распределённого управления.
Система захвата движения NOKOV предоставила точные данные о позиции для лидера БПЛА позволяя ему получать как свою позицию так и информацию о препятствиях в окружающей среде Это гарантировало успешное поддержание формации избегая столкновений с препятствиями.



