
Шестнадцатого апреля ведущий журнал в области робототехники Science Robotics официально опубликовал исследовательскую статью под названием “Раскрытие акробатического потенциала квадрокоптеров: Генерация и выполнение автономных свободных полетов” профессора Гао Фэя и его команды из Школы науки и инженерии управления при Чжэцзянском университете. Первым автором статьи является Ван Мингъян.
Полная система, предложенная в данной статье, позволяет дронам генерировать и выполнять сложные акробатические маневры в сложных условиях с плотными препятствиями. Эффективность этих маневров может соответствовать профессионализму пилотов-людей без необходимости ручного управления.
Система захвата движения NOKOV обеспечила высокоточные данные о положении и ориентации дронов в реальном времени, что помогло подтвердить эффективность полетов при выполнении сложных акробатических маневров в ограниченных пространствах.
Цитирование
Минъян Ван и др. Раскрытие акробатического потенциала квадрокоптеров: Генерация и выполнение автономных свободных полетов. Sci. Robot. 10, eadp9905 (2025). DOI: 10.1126/scirobotics.adp9905
Исследовательский контекст
В 2023 году Сонг и др. [1] и Кауфманн и др. [2] описали использование методов обучения с подкреплением и модельно-предиктивного управления для скоростных гонок дронов, превосходя чемпионов среди пилотов. Однако такие гоночные маневры учитывают лишь конечный результат и не обладают способностью отвечать на необходимые произвольные изменения ориентации, которые являются основной трудностью акробатического полета.
Генерация разнообразных акробатических маневров на основе человеческого намерения остается нерешенной ключевой задачей в акробатическом полете. Кроме того, существующие технологии сталкиваются с проблемами обхода объектов и ограничиваются свободными от препятствий открытыми средами. Таким образом, в более сложных сценариях эти традиционные стратегии не могут гарантировать создание динамически выполнимых траекторий.
Для решения этих проблем профессор Гао Фэй и его команда провели исследования по автономному генерированию и плавному выполнению сложных и непрерывных акробатических маневров дронами в сложных условиях.
Ключевые вклады
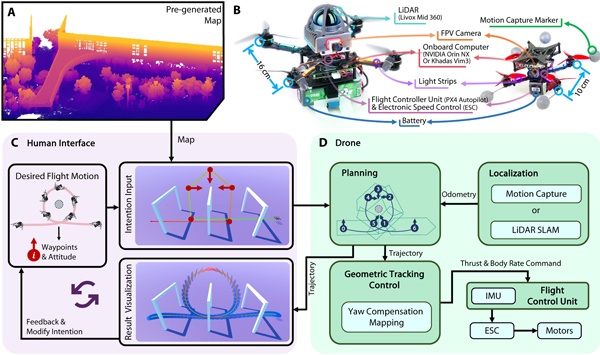
1. Инструкция: Данное исследование предлагает универсальное представление акробатических траекторий, которое лаконично описывает процесс полета как серию дискретных акробатических намерений. Эти намерения, включающие изменения топологической структуры и ориентации, могут быть объединены различными способами для выражения сложных полетных маневров.
2. Планирование: В статье также представлен планировщик траекторий с совместной оптимизацией пространства и времени для создания динамически выполнимых, плавных и свободных от столкновений траекторий полета.
3. Управление: В ответ на проблемы чувствительности рыскания во время акробатических полетов выявлено влияние особенностей дифференциальной плоскости на повороты рыскания и предложены способы избежать связанных с этим динамических проблем.
Эксперименты
1. Крупномасштабные акробатические полеты
Исследовательская группа провела эксперименты по акробатическим полетам в крупномасштабной неструктурированной среде. Система генерировала траектории полета на основе акробатических намерений и могла строго ограничивать чистую тягу и угловую скорость в пределах щедрых верхних границ динамических параметров, гарантируя легкое выполнение дронами акробатических маневров. Это подтвердило возможность автономных акробатических полетов дронов в крупномасштабных неструктурированных средах.
Видео крупномасштабного акробатического полета в неограниченной среде
2. Последовательные акробатические маневры в ограниченных пространствах
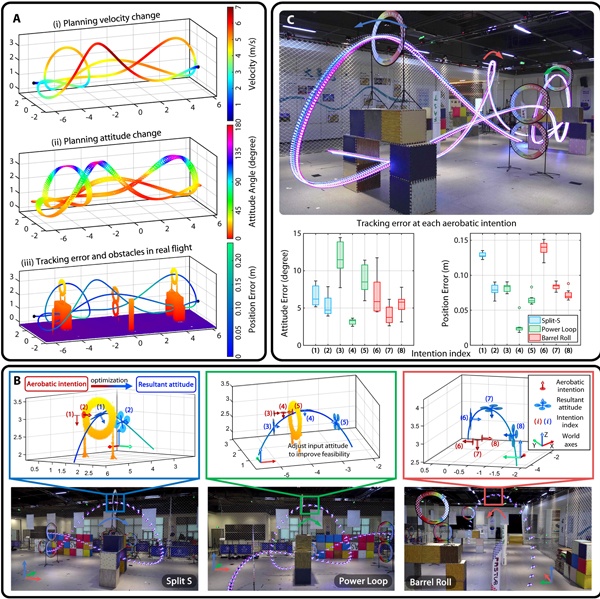
Эксперименты по последовательным акробатическим маневрам проводились в ограниченном пространстве высотой всего 3,5 метра для проверки способности системы генерировать и выполнять акробатические траектории полетов в узких пространствах, особенно рядом с препятствиями. На основе серии акробатических намерений, введенных пользователем, включая общее положение и ориентацию, система использовала оптимизацию пространства и времени для генерации ловких траекторий полета, избегающих препятствия.
Видео последовательных акробатических маневров в ограниченных пространствах с данными о положении и ориентации дрона в реальном времени, предоставленными системой захвата движения NOKOV.
В ходе экспериментов система захвата движения NOKOV использовалась для получения траекторий акробатических полетов и информации об ориентации дронов, включая такие маневры, как полет назад через круглую дверь и частый проход через туннели. Результаты показали, что даже когда интервал между намерениями пользователя был слишком близким, система все равно могла автоматически корректироваться и генерировать динамически выполнимые траектории для успешного завершения акробатических полетных задач в ограниченных пространствах.
Выполнение акробатических маневров с обходом препятствий с данными о положении и ориентации дрона в реальном времени, предоставленными системой захвата движения NOKOV.
3. Сравнение и превосходство над пилотами-людьми
Автономная система, предложенная в данной статье, была сравнена с профессиональным пилотом-человеком с пятилетним опытом полетов. Результаты экспериментов показали, что система достигла 100% успеха при выполнении как одиночных маневров петли, так и множественных последовательных петель, превзойдя профессионального пилота. Это подтвердило производительность и стабильность системы при выполнении сложных акробатических маневров, особенно в отношении процента успешных выполнений и оптимизации траектории при выполнении множественных последовательных акробатических маневров.

Статистика, описывающая процент успешных выполнений непрерывных петель
Система захвата движения NOKOV предоставила высокоточные данные о положении и ориентации дронов в реальном времени, что помогло подтвердить эффективность полетов дронов при выполнении сложных акробатических маневров в ограниченных пространствах.
Статистика, описывающая процент успешных выполнений непрерывных петель
Ссылки
[1] Ю. Сонг, А. Ромеро, М., В., Д. Мюллер, Колтун, Скарамузза, Достижение предела в автономных гонках: Оптимальное управление против обучения с подкреплением. Sci. Robot. 8, eadg1462 (2023).
[2] Е. Кауфманн, Л. Бауэрсфельд, А. Локерчио, М., В., Д. Мюллер, Колтун, Скарамузза, Чемпионский уровень гонок дронов с использованием глубокого обучения с подкреплением. Nature 620, 982–987 (2023).
Авторы
Ван Мингъян: аспирант Школы науки и инженерии управления при Чжэцзянском университете и член Исследовательского института Хучжоу Чжэцзянского университета. Интересы исследований: Планирование движений; Акробатика дронов
Ван Цяньхао: аспирант Школы науки и инженерии управления при Чжэцзянском университете и член Исследовательского института Хучжоу Чжэцзянского университета. Интересы исследований: Автономная навигация дронов
Ван Цзе: аспирант Школы фотонной науки и инженерии при Чжэцзянском университете и член Исследовательского института Хучжоу Чжэцзянского университета. Интересы исследований: Автономные системы, планирование движений, SLAM
Гао Юмань: аспирант Школы науки и инженерии управления при Чжэцзянском университете и член Исследовательского института Хучжоу Чжэцзянского университета. Интересы исследований: автономная навигация дронов.
Ван Цзинпин: магистрант Школы науки и инженерии управления при Чжэцзянском университете и член Исследовательского института Хучжоу Чжэцзянского университета. Интересы исследований: Встраиваемые системы, планирование движений.
Цуй Цань: аспирант Школы науки и инженерии управления при Чжэцзянском университете и член Исследовательского института Хучжоу Чжэцзянского университета. Интересы исследований: Управление полетом, искусственный интеллект в робототехнике.
Ли Юань: выпускник бакалавриата Школы науки и инженерии управления при Чжэцзянском университете и член Исследовательского института Хучжоу Чжэцзянского университета. Интересы исследований: Кластерное восприятие и планирование, большие языковые модели.
Дин Цзымин: аспирант Школы науки и инженерии управления при Чжэцзянском университете и член Исследовательского института Хучжоу Чжэцзянского университета. Интересы исследований: Навигация роботов.
Ван Кайвэй: Профессор и научный руководитель аспирантов Школы фотонной науки и инженерии при Чжэцзянском университете. Интересы исследований: Интеллектуальные визуальные системы и технологии восприятия, точные оптические измерения.
Чжао Сюй: Заместитель декана, профессор и научный руководитель аспирантов Школы науки и инженерии управления при Чжэцзянском университете. Интересы исследований: Робототехника и воплощенные интеллектуальные системы, оптимальное управление и обучение роботов, машинное обучение динамики и управление.
Фэй Гао (Ответственный автор): Постоянный доцент и научный руководитель аспирантов Школы науки и инженерии управления при Чжэцзянском университете. Интересы исследований: Воздушные роботы, автономная навигация, планирование движений, восприятие окружающей среды, роевая робототехника.



