
На конференции ICRA 2025 команда профессора Юй Го из Нанкинского университета науки и технологий представила статью «Управление импедансом в декартовых координатах с фильтрацией команд для манипуляторов с тросовым приводом с компенсацией отказов привода». Эта работа предлагает новую схему, объединяющую управление импедансом с отказоустойчивым управлением, решая две основные проблемы для манипуляторов с тросовым приводом (TDCM) в сложных условиях:
1. Точное отслеживание траектории и согласованное силовое управление
Для достижения этой цели в статье предлагается конечно-временной декартовый импедансный контрольный каркас. Метод использует фильтр нижних частот второго порядка для динамического перепланирования опорной траектории на основе реального времени контактной силы на конце робота. Затем разработан конечно-временной контроллер обратной связи с фильтрацией команд, и строго доказана его сходимость за конечное время при помощи анализа на основе функции Ляпунова. Это обеспечивает как точное отслеживание траектории, так и согласованное взаимодействие с окружающей средой.
2. Деградация производительности из-за отказов приводов
Решая проблему антагонизма тросов и запаздывания приводов, которые могут привести к частичному отказу приводов, авторы создали модель отказов с использованием датчиков натяжения тросов. Предложен алгоритм управления натяжением тросов с компенсацией отказов, который динамически регулирует усилия в тросах в реальном времени. Это значительно повышает надёжность и устойчивость системы, позволяя ей стабильно работать даже при отказах приводов.
Эксперименты в реальных условиях
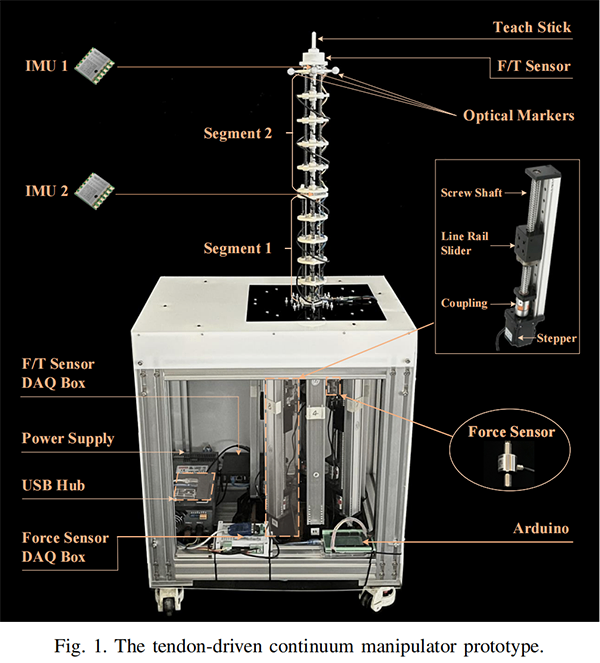
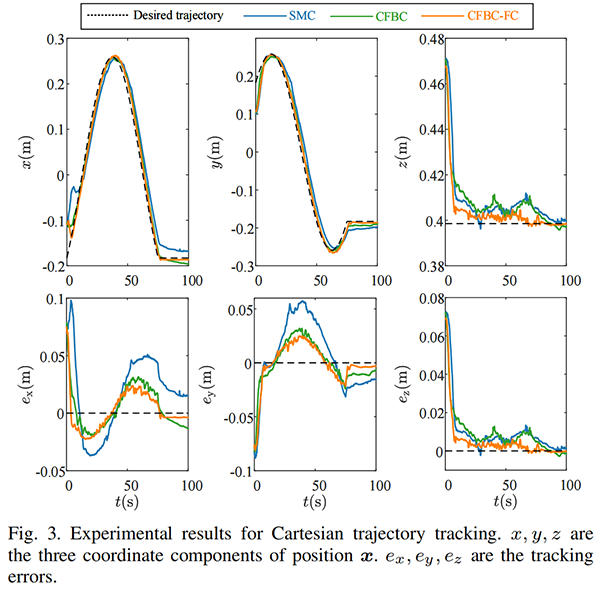
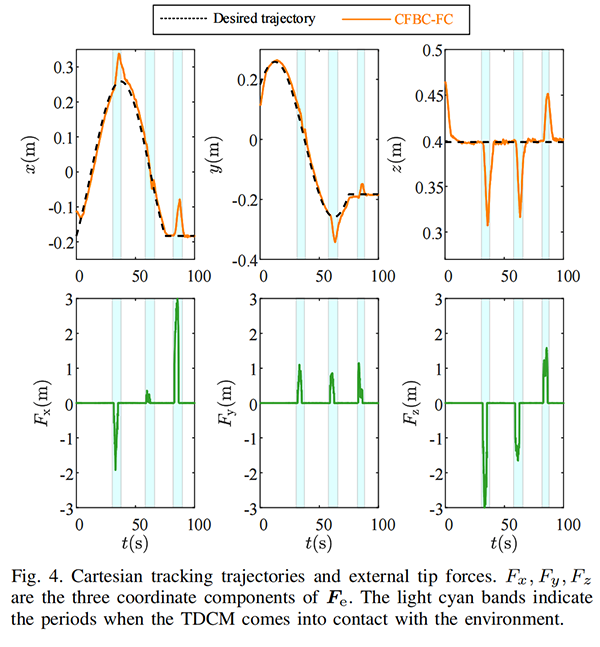
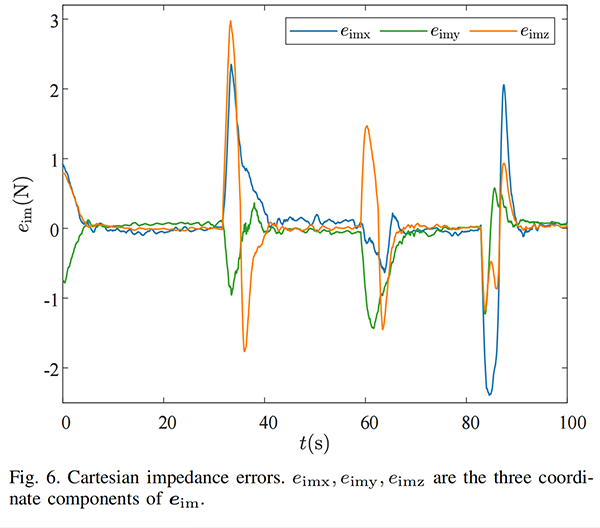
Эксперименты проводились на прототипе TDCM с двумя сегментами (рис. 1). Результаты подтвердили эффективность предложенной схемы управления. В частности, система достигла точности отслеживания траектории в 0,005 метра, что означает более чем 50% улучшения по сравнению с базовыми методами (рис. 3). При взаимодействии с препятствиями ошибка импеданса оставалась в пределах 0,09 Н, а манипулятор быстро возобновил отслеживание траектории после отсоединения (рис. 4). Эти результаты демонстрируют способность комбинированного подхода к управлению достичь как точного отслеживания, так и согласованного взаимодействия, значительно улучшая устойчивость системы.
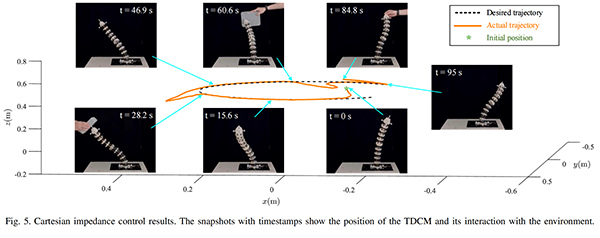
Система захвата движения NOKOV предоставила высокоточные данные о позиции привода в реальном времени (рис. 5), поддержав проверку обоих стратегий управления — импедансной и отказоустойчивой.
Информация об авторах
Чжэн Сяньцзе, аспирант школы автоматизации Нанкинского университета науки и технологий. Исследовательский фокус: моделирование и управление континуальными роботами.
Юй Чжаобао, аспирант школы автоматизации. Исследовательский фокус: согласованное управление и интеллектуальное управление роботами.
Мэн Дин, кандидат наук, школа автоматизации. Исследовательский фокус: моделирование и управление континуальными роботами.
Лю Ляосюэ, доцент школы автоматизации. Исследовательский фокус: космическая робототехника и управление континуальными роботами.
Го Цзянь, профессор и докторский руководитель, школа автоматизации. Исследовательский фокус: интеллектуальное и роботизированное управление.
Го Юй, профессор и докторский руководитель, школа автоматизации. Исследовательский фокус: интеллектуальное управление роботами и управление ориентацией космических аппаратов.



