
Переломы диафиза бедренной кости – это распространенные травмы, возникающие при высокоэнергетических воздействиях, и минимально инвазивная внутренняя фиксация является предпочтительным методом лечения. Однако при имплантации пластин возникают такие проблемы, как невидимость, неточность и нестабильность. Исследовательская группа из Шаньдунского университета предложила метод имплантации пластин с помощью робота с двойным режимом. Этот метод использует нейронную сеть для планирования траектории имплантации пластин, что позволяет использовать высокую стабильность и точность роботизированных манипуляторов для проведения процедуры. Метод является высокоперспективным и обещает решить задачу достижения высокой точности имплантации пластин в минимально инвазивных операциях.
Система захвата движения NOKOV собирает данные о положении в реальном времени во время имплантации пластины, что способствует обучению модели нейронной сети для прогнозирования траектории имплантации.
Цитирование
Guo, Yanchao et al. “A Dual-Mode Robot-Assisted Plate Implantation Method for Femoral Shaft Fracture.” The international journal of medical robotics + computer assisted surgery : MRCAS 20 6 (2024): e70008 .
Экспериментальные методы
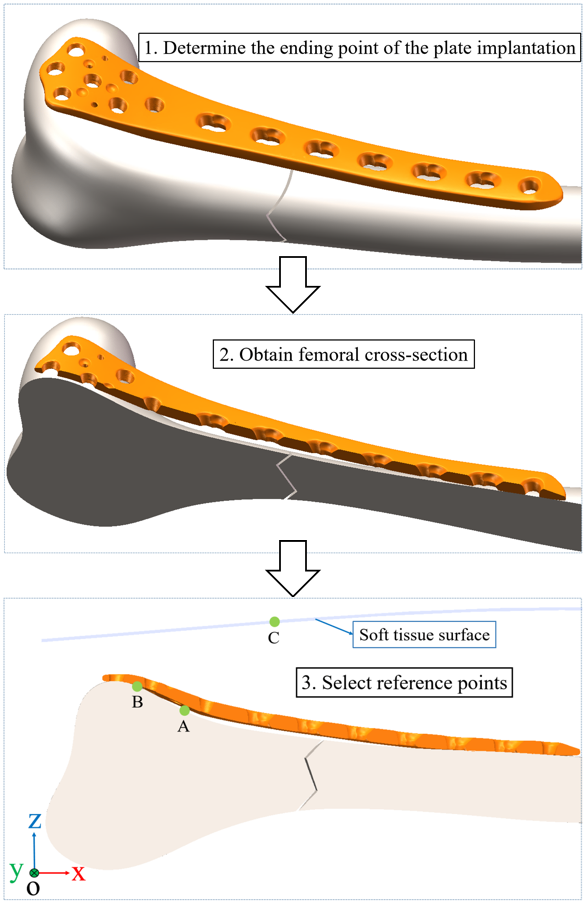
Определение начальной точки имплантации пластины
Автоматический режим на основе алгоритма: После определения конечной точки имплантации пластины в программном обеспечении для реконструкции КТ, 3D-модель бедренной кости анатомически разрезается вдоль плоскости, перпендикулярной пластине и проходящей через ее центральную линию. Точки A и B выбираются на мыщелках бедренной кости в пределах сечения, а точка C выбирается на поверхности мягких тканей пораженной конечности. Затем алгоритм определяет начальную точку имплантации и конечную точку имплантации пластины на основе координат этих трех точек.
Процесс предоперационного планирования
Ручной режим на основе суждений врача: В сложных клинических ситуациях врачи могут вручную выбирать начальную точку для имплантации пластины через систему управления роботизированной рукой.
Эксперимент по сбору траектории
Исследователи используют систему захвата движения NOKOV для сбора данных о траектории имплантации пластины в качестве базы данных для обучения моделей нейронной сети. Во время процесса имплантации каждая камера захвата движения фиксирует двухмерную информацию о положении маркерных точек. Через слияние данных и кинематический анализ можно получить положение, осанку, скорость и ускорение интересующего объекта. Эксперимент по сбору траектории проводится под руководством ортопедов, чтобы гарантировать, что собранные траектории соответствуют клиническим сценариям.
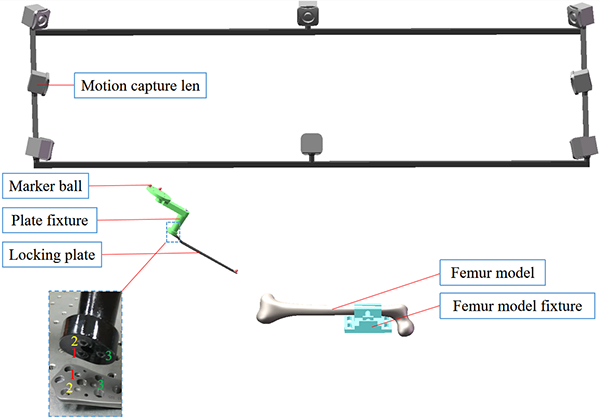
Устройство для сбора траекторий
Построение модели нейронной сети
Обработка данных: Собранные данные о траектории предварительно обрабатываются с учетом координат начальной точки. Каждая траектория делится на две части, состоящие из 10 точек осанки. Осанка всех точек корректируется путем вычитания осанки начальной точки, преобразуя их в относительные точки осанки по отношению к начальной точке. Это снижает сложность сбора данных и обучения модели и позволяет модели быть применимой в различных условиях. Гиперпараметры выбираются для двух моделей нейронных сетей, M и A, с использованием ортогонального тестирования и автоматизированной платформы машинного обучения AutoKeras.
Эксперимент по имплантации пластин
Исследователи разработали хирургическую роботизированную систему с тремя роботизированными руками, каждая из которых выполняет различные этапы: резекцию кости, имплантацию пластины и имплантацию винтов (для фиксации пластины).
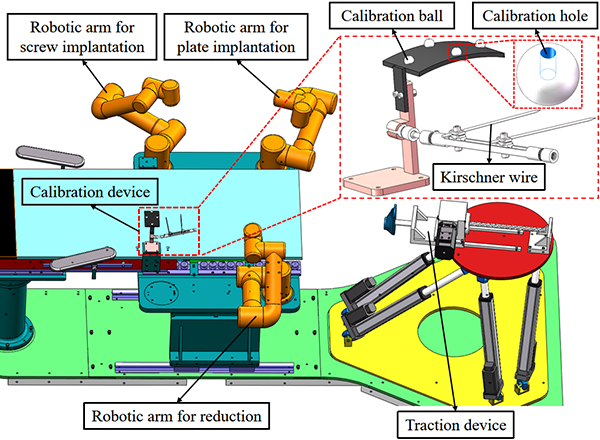
Схема хирургической роботизированной системы
Использование C-дуги для сканирования пораженной конечности и калибровочного шара, а также трехмерная реконструкция с помощью программного обеспечения для КТ-реконструкции. Координаты калибровочного шара в программном обеспечении КТ-реконструкции модифицируются в соответствии с координатами калибровочного шара в базовой системе координат манипулятора, чтобы достичь согласованности между базовой системой координат манипулятора и системой координат программного обеспечения для КТ-реконструкции. Впоследствии в программном обеспечении для КТ-реконструкции можно виртуально редуцировать сломанные кости, а затем использовать манипулятор и тяговое устройство для фактической редукции и поддержания. Затем модель стальной пластины, используемая в данной операции, импортируется в программное обеспечение и настраивается в идеальное положение, чтобы определить конечную точку имплантации пластины. В завершение, манипулятор для имплантации винтов завершает имплантацию в зависимости от положения пластины.
Исследователи проверили эффективность этого метода через эксперименты, и результаты показали, что траектория имплантации пластины, предсказанная нейронной сетью, соответствует практическому клиническому режиму имплантации пластины. Манипулятор способен точно имплантировать пластину в конечную точку, и пластина не сталкивается с моделью бедренной кости в процессе имплантации.
Система захвата движений NOKOV оцифровывает операцию, собирая траекторию имплантации пластины, что способствует автоматизации процесса операции и предоставляет справочную информацию для разработки других роботизированных вспомогательных хирургических систем.
Информация об авторах:
Го Яньчао — аспирант Шаньдунского университета в Институте машиностроения, основное направление исследований: роботизированные системы помощи имплантации пластин, цифровая хирургическая операция.
Чэнь Имяо — магистрант Шаньдунского университета в Институте машиностроения, основное направление исследований: роботизированные системы фиксации пластин, биомеханическое моделирование и симуляция.
Чжоу Сянчжэн — аспирант Шаньдунского университета в Институте машиностроения, основное направление исследований: устройства для ультразвуковой имплантации винтов, анализ качества поверхности сверления кости и исследование стабильности винтов.
Би Цзяньпин — заместитель главного врача в ортопедическом отделении при Шаньдунском университете традиционной китайской медицины, основное направление исследований: высокоточные роботизированные системы для операций при переломах конечностей, визуализационные системы для традиционной китайской медицины, роботизированные системы вытяжения и репозиции переломов.
Джейсон З. Мур — доцент кафедры машиностроения Пенсильванского государственного университета, директор лаборатории проектирования прецизионных медицинских инструментов. Основное направление исследований: взаимодействие медицинских инструментов с тканями человека, использование мехатронных технологий для улучшения обучения медицинскому делу и физиотерапевтического оборудования.
Чжан Цинхэ (ответственный автор) — профессор и научный руководитель докторских диссертаций в Институте машиностроения Шаньдунского университета. Основное направление исследований: нетрадиционные технологии обработки и оборудование, цифровое проектирование и производство продукции, виртуальная прототипизация, передовые медицинские приборы и медицинская робототехника.



