На протяжении тысячелетней истории производства спиртных напитков в Китае традиционный процесс брожения постоянно усовершенствовался. Устройство, используемое в этом процессе, называется ретортой и изначально было разработано как инструмент для паровой обработки. В процессе дистилляции в реторте сырьё равномерно укладывается в реторту слоями, что обеспечивает равномерный поток пара снизу вверх. Затем алкоголь дистиллируется из реторты и собирается.

Fig. 1 процесс котла
В качестве основного этапа производства алкоголя процесс перегонки непосредственно определяет выход и качество производимого напитка. В настоящее время в большинстве пивоварен процесс перегонки все еще требует значительных трудозатрат. В течение этого времени, которое обычно занимает от 35 до 40 минут, работникам приходится повторять действия по черпанию и распределению сотни тысяч раз, обрабатывая общую массу материалов, превышающую две тонны.

Fig. 2 Результаты обобщения траекторий под кормлением искусственного котла
Появление высокоточных и высоконагруженных промышленных роботов позволило проводить замену ручного труда в процессе дистилляции. Существующие роботы выполняют действия в соответствии с предустановленными командами, которые предназначены для равномерного укладывания сырья в реторту. Однако в некоторых случаях эта задача становится затруднительной из-за ограничений в диапазоне движений робота.

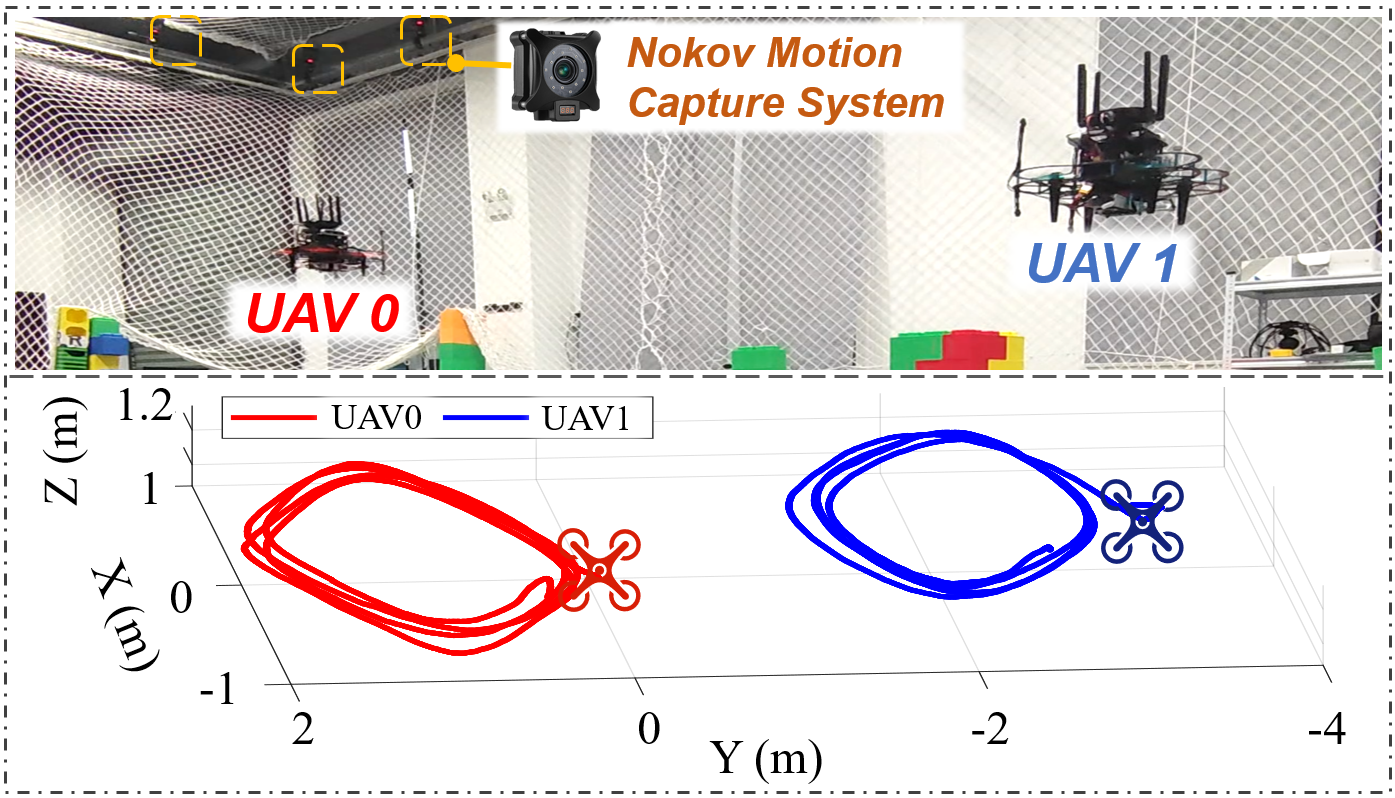
Fig.3Система захвата движения Nokov с инфракрасным излучением
Чтобы максимально точно имитировать процесс ручной дистилляции, исследователи из Шанхайского университета Цзяотун разработали роботизированную систему для процесса дистилляции после анализа ручных операций по дистилляции. Исследователи разместили 6 оптических камер захвата движения NOKOV на месте дистилляции, прикрепили три отражающих маркера к совку и записали движение и траекторию совка, используя эти маркеры.

Figure 4 Вид сверху на рабочее пространство
Поскольку ручной труд не может обеспечить идеальную согласованность при распределении материалов для реторт, исследователи предложили обобщённый алгоритм для траектории подачи котла на основе гауссовой модели B-сплайна. Информация, собранная системой захвата движения NOKOV, импортируется в эту обобщённую модель для получения траектории совка во время процесса дистилляции.


После установления обобщения исследователи разделили рабочую область, рассчитали необходимую траекторию панорамирования для каждой области и разработали роботизированную систему реторты. Эта система использует шестенаправленный промышленный манипулятор и оснащена механизмом верхнего бункера, который может контролировать скорость подачи корыта.

Рисунок 6 3D вид рабочего пространства робота дистилляции
Вычислив максимальную скорость в каждой области и характеристики сервомотора в механизме бункера, исследователи установили автономную работу реторты, которая тесно имитировала результаты ручного труда.
Библиография:
[1] Ян И, Ван Хунбин, Чжан Лийин и др. Система управления роботами для подачи в котел в традиционной дистилляции китайского алкоголя [J]. Наука, технологии и инженерия, 2021, 21(36): 15516-15528.