Вес и инерционная сила механических экзоскелетов вызывают быстрые изменения в силе удара экзоскелета на носителя. Эта сила часто неизбежна, когда экзоскелет плотно облегает тело оператора. Эти проблемы не только снижают комфорт и портативность экзоскелета, но также увеличивают энергозатраты оператора.
Государственная ключевая лаборатория робототехники и систем Харбинского технологического института предложила новый тип механического экзоскелета, включающего механизм подвески с постоянной силой и самоподстраивающиеся упругие соединения.

Механический экзоскелет с механизмом постоянной силы подвески, надеваемый на нижние конечности человеческого тела.
Механизм подвески с постоянной силой предназначен для снижения влияния веса экзоскелета на носителя. На скоростях 5 и 9 км/ч экспериментатор, носивший экзоскелет с механизмом подвески с постоянной силой, достиг чистого уменьшения метаболических затрат на 10.95/4.40% и 1.71/4.54% соответственно, по сравнению с тестовым экзоскелетом без механизма подвески с постоянной силой. Эти результаты указывают на то, что такая система может эффективно облегчить движение оператора экзоскелета.
Также были разработаны самоуправляемые гибкие суставы, чтобы уменьшить несоответствие между суставами экзоскелета и оператором. Исследователи разработали коленный сустав экзоскелета, который позволял экзоскелету синхронизироваться с человеческим телом, создавая точный мгновенный центр вращения (ICR) между экзоскелетом и телом. Также были разработаны тазобедренные суставы экзоскелета, которые могли различать стояние и другие позы, а затем использовать эти данные для формирования ICR.
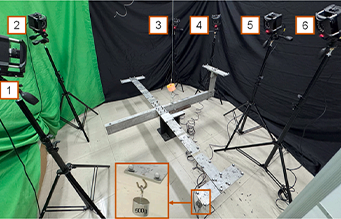
Чтобы оценить эффективность самоадаптирующихся композитных суставов, исследователи HIT использовали технологии захвата движения NOKOV для точного измерения. Восемь камер NOKOV MARS записывали данные о движениях экспериментальных субъектов, как в экзоскелетах, так и без них. Полученные данные показали, что несоответствие между механическим экзоскелетом с адаптивными мягкими суставами и телом оператора было очень небольшим, и влияние экзоскелета на походку оператора было незначительным.
Ссылки: H. Li, D. Sui, H. Ju, Y. An, J. Zhao и Y. Zhu, Механическая гибкость и проектирование динамической изоляции нагрузки для экзоскелета нижних конечностей для помощи при движении, в IEEE/ASME Transactions on Mechatronics, 2022, doi: 10.1109/TMECH.2022.3181261.
Библиография: