С развитием современной индустрии и прогрессом науки и технологий робототехника проникла во все сферы общества, особенно роботизированная рука стала опорой промышленного производства. Однако с постоянно растущими требованиями людей к производству, существует настоятельная надежда, что роботы смогут выполнять более сложные и тонкие задачи, как это делают люди, но одноручные роботы не могут удовлетворить такие требования. Поэтому крайне важно проводить исследования по связанным технологиям двуручных роботов.

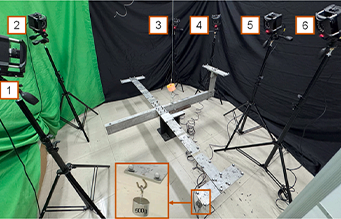
Цуй Цзе, преподаватель Школы механики и электротехники и автоматизации Шанхайского университета, использовал оптическую 3D систему захвата движений NOKOV для изучения кооперативного управления роботами с двумя манипуляторами. Рабочие пространства пересекаются во время независимого движения, что может привести к случайным столкновениям роботов с двумя руками. Поэтому обнаружение столкновений в системе роботов с двумя манипуляторами является одной из важных проблем в планировании траектории манипуляторной системы.

Команда учителя Цуй сначала прикрепила маркеры к ключевым узлам роботизированной руки, а затем использовала метод капсульного ограничивающего объема для моделирования контура системы с двумя руками в соответствии с положением этих маркеров. Таким образом, проверка на столкновение для двуростового робота может быть преобразована в инспекцию на помехи между сферами и цилиндрами, что значительно упрощает сложность проверки на столкновения.
Кроме того, в скоординированном движении роботов с двумя манипуляторами обычно используется режим "master-slave", то есть один манипулятор является главным, а другой - ведомым. Для двух манипуляторов, которые могут работать в координации, необходимо найти соотношение координации между углом и скоростью суставов главного манипулятора и углом и скоростью суставов ведомого манипулятора, которое задается набором полных равенств.
Система оптического 3D захвата движения NOKOV может не только предоставлять точные координаты маркеров с точностью до субмиллиметра, но также давать такие данные, как скорость, ускорение и углы Эйлера жесткого тела, образованного соответствующими точками, что позволяет получать данные в реальном времени для определения ограничительных отношений в процессе совместной работы.

На протяжении длительного времени рынок промышленных роботизированных манипуляторов был монополизирован некоторыми устоявшимися предприятиями в Европе и Японии. NOKOV использует захват движения, чтобы помочь отечественной индустрии промышленных роботизированных манипуляторов и постоянно поддерживает исследования и разработки отечественных манипуляторов и системы двуногих роботов.