Автономные услуги в орбите продлевают срок службы и функциональность спутников, платформ, модулей космических станций и космических носителей с помощью интеллектуальных сервисных космических аппаратов. Исследования технологий автономных услуг в орбите снизят эксплуатационные расходы космических аппаратов и способствуют устойчивому развитию аэрокосмической отрасли. Разработка автономных систем позиционирования и навигации для независимых космических аппаратов является первоочередным направлением исследований из-за своей теоретической и практической значимости.

Схема отслеживания независимых захватывающих космических аппаратов
В настоящее время независимые датчики позиционирования целей делятся на три категории: монофокальные камеры, бинокулярные камеры и технологии lidar. Среди них системы позиционирования, использующие монофокальные камеры, могут захватывать только определенные структуры на поверхности целевого космического аппарата, такие как прямоугольники, треугольники, круги или другие объекты с известными геометрическими характеристиками и размерами. Среди этих характеристик кольцо для стыковки в форме звезды и сопло двигателя захватываются как круги, антенна космического аппарата — как треугольник, а солнечная панель и корпус спутника — как прямоугольники.
Исследователи из Пекинского университета аэронавтики и астронавтики предложили метод позиционирования, основанный на характеристиках целевой структуры, для автономной навигации относительно цели.

Камеры захвата движения NOKOV, размещенные над испытательной площадкой для сбора данных.
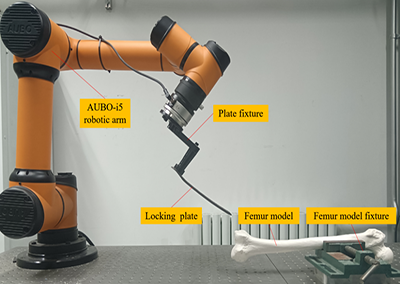
Чтобы протестировать свой алгоритм, исследователи провели наземные эксперименты. Роботизированная рука, оснащенная визуальным сенсором, заменила служебный аппарат, в то время как другая роботизированная рука, нагруженная моделью космического корабля, выступала в роли целевого космического аппарата, позволяя обоим "космическим аппаратам" иметь шесть направлений движения. Данные о позиционировании в реальном времени записывались системой захвата движения NOKOV.

Съемка целевой позиции в реальном времени с помощью системы захвата движения NOKOV
Во время эксперимента целевой космический аппарат выполнял вращательные и трансляционные движения, в то время как сервисный космический аппарат визуально отслеживал движения через сенсор, а затем вычислял положение цели с помощью алгоритма оценки положения. Подмиллиметровая точность позиционирования системы захвата движения NOKOV позволила ей зафиксировать фактические данные о положении цели.

График ошибки решения позиции

График ошибки решения по atitude
Этот эксперимент сравнил позицию, определенную алгоритмом оценки положения, с фактической позицией, предоставленной системой захвата движения NOKOV, и подтвердил достоверность и точность алгоритма. Анализ экспериментальных результатов показывает, что ошибка по положению составляет менее 10 миллиметров, в то время как ошибка вращения меньше 2,5°, что подтверждает жизнеспособность алгоритма.
Библиография: