Эта статья представляет новую модель экзоскелета, прошедшую валидацию через динамические эксперименты. Система захвата движения NOKOV предоставила важные данные для расчета походки и сил реакции опоры, что подтвердило кинематическую точность модели.
Модель камеры: недоступноТип объекта: Человеческая спина, экзоскелетMocap Space: нет данных
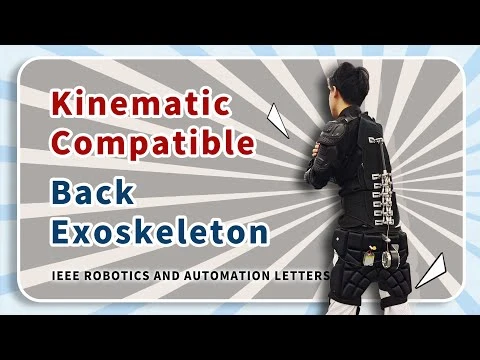
Спинной экзоскелет
Это исследование предложило кинематически совместимый дизайн экзоскелета для спины, который может уменьшить боль и травмы в поясничной области у работников, обеспечивая при этом комфортное взаимодействие между человеком и экзоскелетом и достаточный диапазон движения. NOKOV Motion Capture помог продемонстрировать кинематическую совместимость человек-экзоскелет.
Эта лаборатория разработала протезы для помощи людям с ограниченными возможностями, экзоскелеты (роботы) для помощи солдатам и рюкзачные системы для помощи людям, которым приходится носить тяжелый груз. Система захвата движения NOKOV помогла достичь точного понимания характеристик движения человека и определения моментов, когда людям нужна помощь, что является ключевой информацией для исследовательских проектов.
Модель камеры: недоступноObject Type: Человеческое тело, ЭкзоскелетMocap Space: нет данных
Робот-экзоскелет для помощи в ходьбе: Мониторинг метаболизма в реальном времени
Это исследование установило платформу для анализа походки в человеко-компьютерном взаимодействии с использованием NOKOV MoCap. Это средство для помощи в походке для экзоскелетных роботов, используемое для мониторинга метаболического расхода энергии и походки в режиме реального времени.
Дискуссионная панель с взаимодействием с аудиторией и прямой трансляцией для более чем 12,000 исследовательских профессионалов на социальных платформах NOKOV.
Интервью
Экспертные интервью предлагают ценную информацию и демонстрируют достижения ведущих профессионалов, вдохновляя нашу аудиторию, ориентированную на исследования.
Рекомендации
Камеры для высокопроизводительной захвата движения
Откройте для себя серию Mars, предлагающую передовые показатели частоты кадров и сверхвысокие разрешения. Идеально подходит для продвинутого отслеживания движения и измерений в различных областях.
Разрешение до 26 миллионов пикселей, 380 кадров в секунду.
Субмиллиметровая 3D точность
Модели доступны для использования в помещении, на улице и под водой.